正在加载图片...
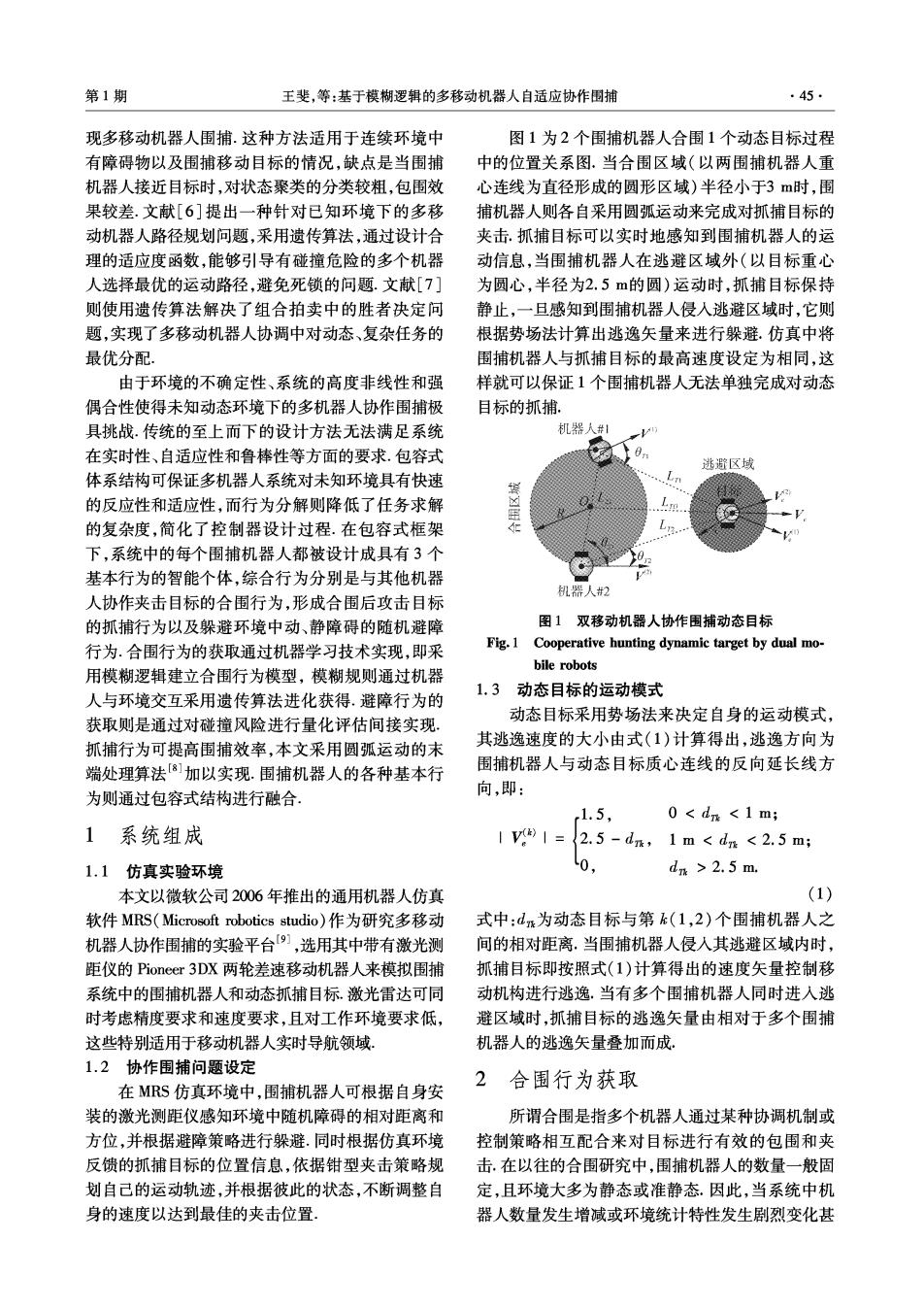
第1期 王斐,等:基于模糊逻辑的多移动机器人自适应协作围捕 ·45 现多移动机器人围捕.这种方法适用于连续环境中 图1为2个围捕机器人合围1个动态目标过程 有障碍物以及围捕移动目标的情况,缺点是当围捕 中的位置关系图.当合围区域(以两围捕机器人重 机器人接近目标时,对状态聚类的分类较粗,包围效 心连线为直径形成的圆形区域)半径小于3m时,围 果较差.文献[6]提出一种针对已知环境下的多移 捕机器人则各自采用圆弧运动来完成对抓捕目标的 动机器人路径规划问题,采用遗传算法,通过设计合 夹击.抓捕目标可以实时地感知到围捕机器人的运 理的适应度函数,能够引导有碰撞危险的多个机器 动信息,当围捕机器人在逃避区域外(以目标重心 人选择最优的运动路径,避免死锁的问题.文献[7] 为圆心,半径为2.5m的圆)运动时,抓捕目标保持 则使用遗传算法解决了组合拍卖中的胜者决定问 静止,一旦感知到围捕机器人侵入逃避区域时,它则 题,实现了多移动机器人协调中对动态、复杂任务的 根据势场法计算出逃逸矢量来进行躲避.仿真中将 最优分配, 围捕机器人与抓捕目标的最高速度设定为相同,这 由于环境的不确定性、系统的高度非线性和强 样就可以保证1个围捕机器人无法单独完成对动态 偶合性使得未知动态环境下的多机器人协作围捕极 目标的抓捕 具挑战.传统的至上而下的设计方法无法满足系统 机器人# 在实时性、自适应性和鲁棒性等方面的要求.包容式 逃避区域 体系结构可保证多机器人系统对未知环境具有快速 7 的反应性和适应性,而行为分解则降低了任务求解 的复杂度,简化了控制器设计过程.在包容式框架 下,系统中的每个围捕机器人都被设计成具有3个 基本行为的智能个体,综合行为分别是与其他机器 机器人#2 人协作夹击目标的合围行为,形成合围后攻击目标 的抓捕行为以及躲避环境中动、静障碍的随机避障 图1双移动机器人协作围捕动态目标 行为.合围行为的获取通过机器学习技术实现,即采 Fig.1 Cooperative hunting dynamic target by dual mo- bile robots 用模糊逻辑建立合围行为模型,模糊规则通过机器 人与环境交互采用遗传算法进化获得.避障行为的 1.3动态目标的运动模式 获取则是通过对碰撞风险进行量化评估间接实现. 动态目标采用势场法来决定自身的运动模式, 抓捕行为可提高围捕效率,本文采用圆弧运动的末 其逃逸速度的大小由式(1)计算得出,逃逸方向为 端处理算法⑧]加以实现.围捕机器人的各种基本行 周捕机器人与动态目标质心连线的反向延长线方 为则通过包容式结构进行融合 向,即: 1.5, 0<d%<1m; 1系统组成 2.5-dnk,1m<d%<2.5m; 1.1仿真实验环境 da>2.5m. 本文以微软公司2006年推出的通用机器人仿真 (1) 软件MRS(Microsoft robotics studio)作为研究多移动 式中:d为动态目标与第k(1,2)个围捕机器人之 机器人协作围捕的实验平台9),选用其中带有激光测 间的相对距离.当围捕机器人侵入其逃避区域内时, 距仪的Pioneer3DX两轮差速移动机器人来模拟围捕 抓捕目标即按照式(1)计算得出的速度矢量控制移 系统中的围捕机器人和动态抓捕目标.激光雷达可同 动机构进行逃逸.当有多个围捕机器人同时进入逃 时考虑精度要求和速度要求,且对工作环境要求低, 避区域时,抓捕目标的逃逸矢量由相对于多个围捕 这些特别适用于移动机器人实时导航领域。 机器人的逃逸矢量叠加而成。 1.2协作围捕问题设定 2合围行为获取 在MRS仿真环境中,围捕机器人可根据自身安 装的激光测距仪感知环境中随机障碍的相对距离和 所谓合围是指多个机器人通过某种协调机制或 方位,并根据避障策略进行躲避.同时根据仿真环境 控制策略相互配合来对目标进行有效的包围和夹 反馈的抓捕目标的位置信息,依据钳型夹击策略规 击.在以往的合围研究中,围捕机器人的数量一般固 划自己的运动轨迹,并根据彼此的状态,不断调整自 定,且环境大多为静态或准静态.因此,当系统中机 身的速度以达到最佳的夹击位置 器人数量发生增减或环境统计特性发生剧烈变化甚