正在加载图片...
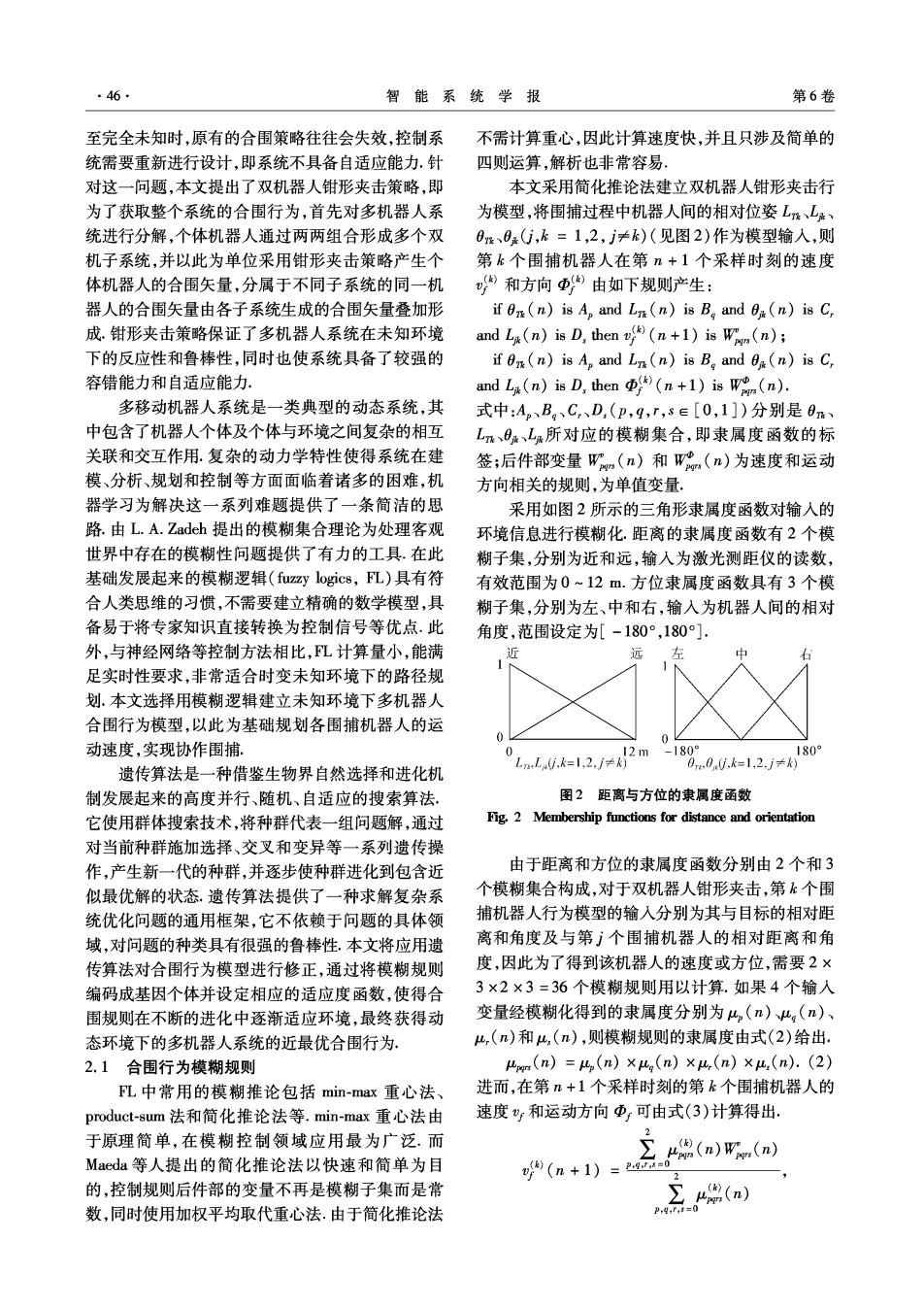
.46 智能系统学报 第6卷 至完全未知时,原有的合围策略往往会失效,控制系 不需计算重心,因此计算速度快,并且只涉及简单的 统需要重新进行设计,即系统不具备自适应能力.针 四则运算,解析也非常容易: 对这一问题,本文提出了双机器人钳形夹击策略,即 本文采用简化推论法建立双机器人钳形夹击行 为了获取整个系统的合围行为,首先对多机器人系 为模型,将围捕过程中机器人间的相对位姿L、L 统进行分解,个体机器人通过两两组合形成多个双 0、0G,k=1,2,j≠)(见图2)作为模型输入,则 机子系统,并以此为单位采用钳形夹击策略产生个 第k个围捕机器人在第n+1个采样时刻的速度 体机器人的合围矢量,分属于不同子系统的同一机 和方向由如下规则产生: 器人的合围矢量由各子系统生成的合围矢量叠加形 if 0n(n)is A,and Ln (n)is B and 0 (n)is C. 成.钳形夹击策略保证了多机器人系统在未知环境 and La(n)is D,then (n+1)is Wi (n); 下的反应性和鲁棒性,同时也使系统具备了较强的 if n (n)is A,and Ln (n)is B and 0 (n)is C. 容错能力和自适应能力. and La (n)is D,then p (n+1)is Wo (n). 多移动机器人系统是一类典型的动态系统,其 式中:A2、B,、C,、D,(P,9,T,s∈[0,1])分别是0、 中包含了机器人个体及个体与环境之间复杂的相互 L、日、L所对应的模糊集合,即隶属度函数的标 关联和交互作用.复杂的动力学特性使得系统在建 签;后件部变量Wn(n)和W,(n)为速度和运动 模、分析、规划和控制等方面面临着诸多的困难,机 方向相关的规则,为单值变量 器学习为解决这一系列难题提供了一条简洁的思 采用如图2所示的三角形隶属度函数对输入的 路.由L.A.Zadeh提出的模糊集合理论为处理客观 环境信息进行模糊化.距离的隶属度函数有2个模 世界中存在的模糊性问题提供了有力的工具.在此 糊子集,分别为近和远,输入为激光测距仪的读数, 基础发展起来的模糊逻辑(fuzzy logics,FL)具有符 有效范围为0~12m.方位隶属度函数具有3个模 合人类思维的习惯,不需要建立精确的数学模型,具 糊子集,分别为左、中和右,输入为机器人间的相对 备易于将专家知识直接转换为控制信号等优点.此 角度,范围设定为[-180°,180°]. 外,与神经网络等控制方法相比,L计算量小,能满 近 远 左 足实时性要求,非常适合时变未知环境下的路径规 划.本文选择用模糊逻辑建立未知环境下多机器人 合围行为模型,以此为基础规划各围捕机器人的运 动速度,实现协作围捕。 2m-180° LL0,k=1,2,j≠k) 遗传算法是一种借鉴生物界自然选择和进化机 0.0.k=1.2/≠k1809 制发展起来的高度并行、随机、自适应的搜索算法。 图2距离与方位的隶属度函数 它使用群体搜索技术,将种群代表一组问题解,通过 Fig.2 Membership functions for distance and orientation 对当前种群施加选择、交叉和变异等一系列遗传操 作,产生新一代的种群,并逐步使种群进化到包含近 由于距离和方位的隶属度函数分别由2个和3 似最优解的状态.遗传算法提供了一种求解复杂系 个模糊集合构成,对于双机器人钳形夹击,第k个围 统优化问题的通用框架,它不依赖于问题的具体领 捕机器人行为模型的输入分别为其与目标的相对距 域,对问题的种类具有很强的鲁棒性.本文将应用遗 离和角度及与第j个围捕机器人的相对距离和角 传算法对合围行为模型进行修正,通过将模糊规则 度,因此为了得到该机器人的速度或方位,需要2× 编码成基因个体并设定相应的适应度函数,使得合 3×2×3=36个模糊规则用以计算,如果4个输人 围规则在不断的进化中逐渐适应环境,最终获得动 变量经模糊化得到的隶属度分别为,(n)g(n)、 态环境下的多机器人系统的近最优合围行为 4,(n)和4,(n),则模糊规则的隶属度由式(2)给出. 2.1合围行为模糊规则 ugn(n)=h,(n)×ug(n)×4,(n)×u,(n).(2) FL中常用的模糊推论包括min-max重心法 进而,在第n+1个采样时刻的第k个围捕机器人的 product--sum法和简化推论法等.min-max重心法由 速度和运动方向更可由式(3)计算得出. 于原理简单,在模糊控制领域应用最为广泛.而 (n)Wis (n) Maeda等人提出的简化推论法以快速和简单为目 y(n+1)=9=0 的,控制规则后件部的变量不再是模糊子集而是常 数,同时使用加权平均取代重心法.由于简化推论法 (