正在加载图片...
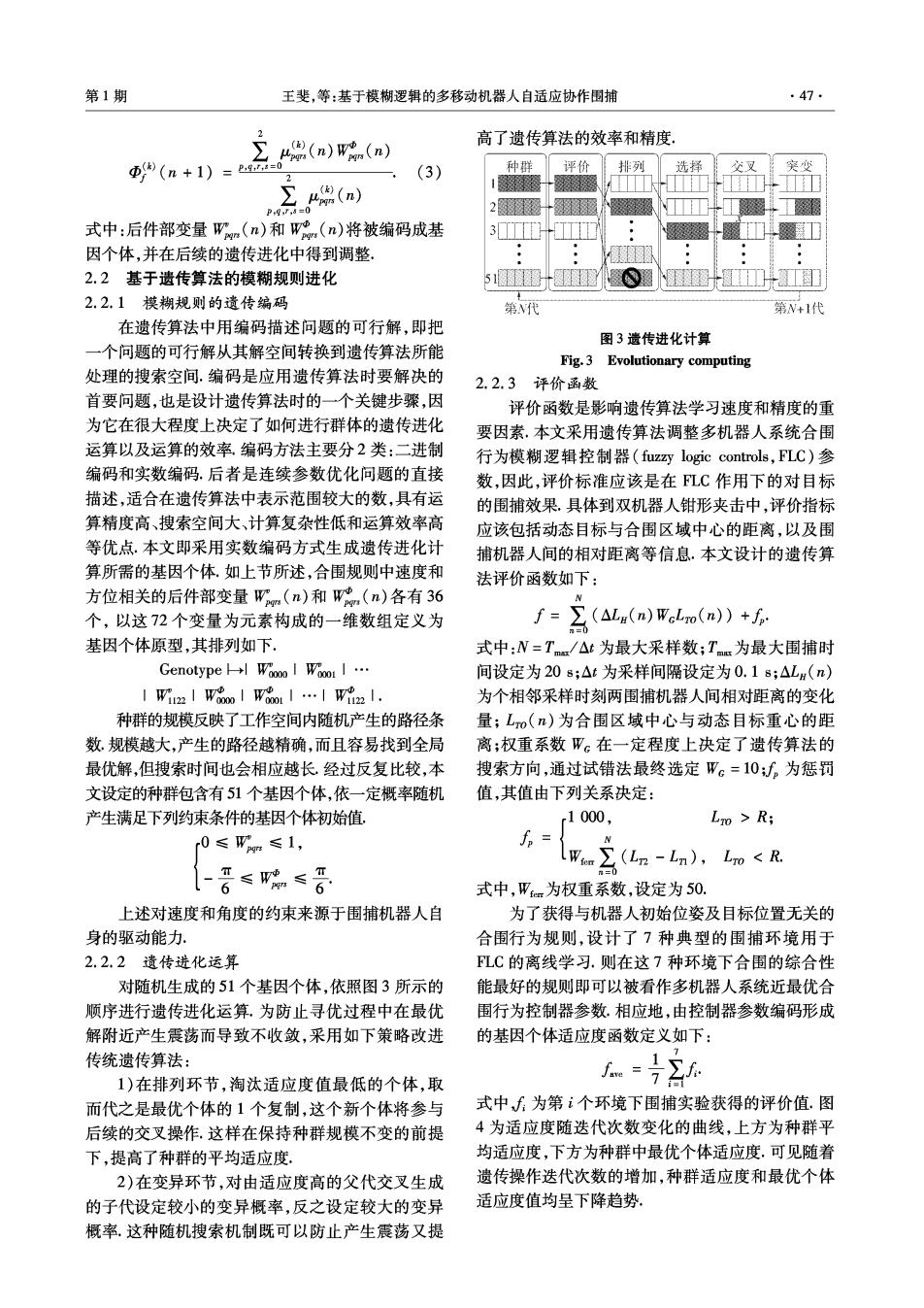
第1期 王斐,等:基于模糊逻辑的多移动机器人自适应协作围捕 ·47… (n)W(n) 高了遗传算法的效率和精度 Φ(n+1) 9=0 (3 种群 评价 排列 选择 交叉 突变 ∑(n) P9,,d=0 2 式中:后件部变量W(n)和W(n)将被编码成基 3+ 因个体,并在后续的遗传进化中得到调整, 2.2基于遗传算法的模糊规则进化 2.2.1模糊规则的遗传编码 第代 第W+1代 在遗传算法中用编码描述问题的可行解,即把 图3遗传进化计算 一个问题的可行解从其解空间转换到遗传算法所能 Fig.3 Evolutionary computing 处理的搜索空间.编码是应用遗传算法时要解决的 2.2.3评价函数 首要问题,也是设计遗传算法时的一个关键步骤,因 评价函数是影响遗传算法学习速度和精度的重 为它在很大程度上决定了如何进行群体的遗传进化 要因素.本文采用遗传算法调整多机器人系统合围 运算以及运算的效率编码方法主要分2类:二进制 行为模糊逻辑控制器(fuz四logic controls,FLC)参 编码和实数编码,后者是连续参数优化问题的直接 数,因此,评价标准应该是在LC作用下的对目标 描述,适合在遗传算法中表示范围较大的数,具有运 的围捕效果.具体到双机器人钳形夹击中,评价指标 算精度高、搜索空间大、计算复杂性低和运算效率高 应该包括动态目标与合围区域中心的距离,以及围 等优点.本文即采用实数编码方式生成遗传进化计 捕机器人间的相对距离等信息.本文设计的遗传算 算所需的基因个体.如上节所述,合围规则中速度和 法评价函数如下: 方位相关的后件部变量Wm(n)和W(n)各有36 个,以这72个变量为元素构成的一维数组定义为 f=∑(△Lg(n)WLm(n)+f 基因个体原型,其排列如下, 式中:N=Tma/△t为最大采样数;Tma为最大围捕时 Genotype b+l Woooo I Wooor I... 间设定为20s;△t为采样间隔设定为0.1s;△Lm(n) I Wi22 I Wooo I Wooor I...I Wi22 1. 为个相邻采样时刻两围捕机器人间相对距离的变化 种群的规模反映了工作空间内随机产生的路径条 量;Lo(n)为合围区域中心与动态目标重心的距 数规模越大,产生的路径越精确,而且容易找到全局 离;权重系数W。在一定程度上决定了遗传算法的 最优解,但搜索时间也会相应越长经过反复比较,本 搜索方向,通过试错法最终选定Wc=10:f。为惩罚 文设定的种群包含有51个基因个体,依一定概率随机 值,其值由下列关系决定: 产生满足下列约束条件的基因个体初始值, r1000. LTo >R; r0≤W≤1, f,= lWa∑(Ln-Ln),Lw<R. T ≤院≤石 三0 6 式中,Wm为权重系数,设定为50. 上述对速度和角度的约束来源于围捕机器人自 为了获得与机器人初始位姿及目标位置无关的 身的驱动能力. 合围行为规则,设计了7种典型的围捕环境用于 2.2.2遗传进化运算 LC的离线学习.则在这7种环境下合围的综合性 对随机生成的51个基因个体,依照图3所示的 能最好的规则即可以被看作多机器人系统近最优合 顺序进行遗传进化运算,为防止寻优过程中在最优 围行为控制器参数.相应地,由控制器参数编码形成 解附近产生震荡而导致不收敛,采用如下策略改进 的基因个体适应度函数定义如下: 传统遗传算法: 1)在排列环节,淘汰适应度值最低的个体,取 而代之是最优个体的1个复制,这个新个体将参与 式中,f为第i个环境下围捕实验获得的评价值.图 后续的交叉操作.这样在保持种群规模不变的前提 4为适应度随迭代次数变化的曲线,上方为种群平 下,提高了种群的平均适应度, 均适应度,下方为种群中最优个体适应度.可见随着 2)在变异环节,对由适应度高的父代交叉生成 遗传操作迭代次数的增加,种群适应度和最优个体 的子代设定较小的变异概率,反之设定较大的变异 适应度值均呈下降趋势. 概率.这种随机搜索机制既可以防止产生震荡又提