正在加载图片...
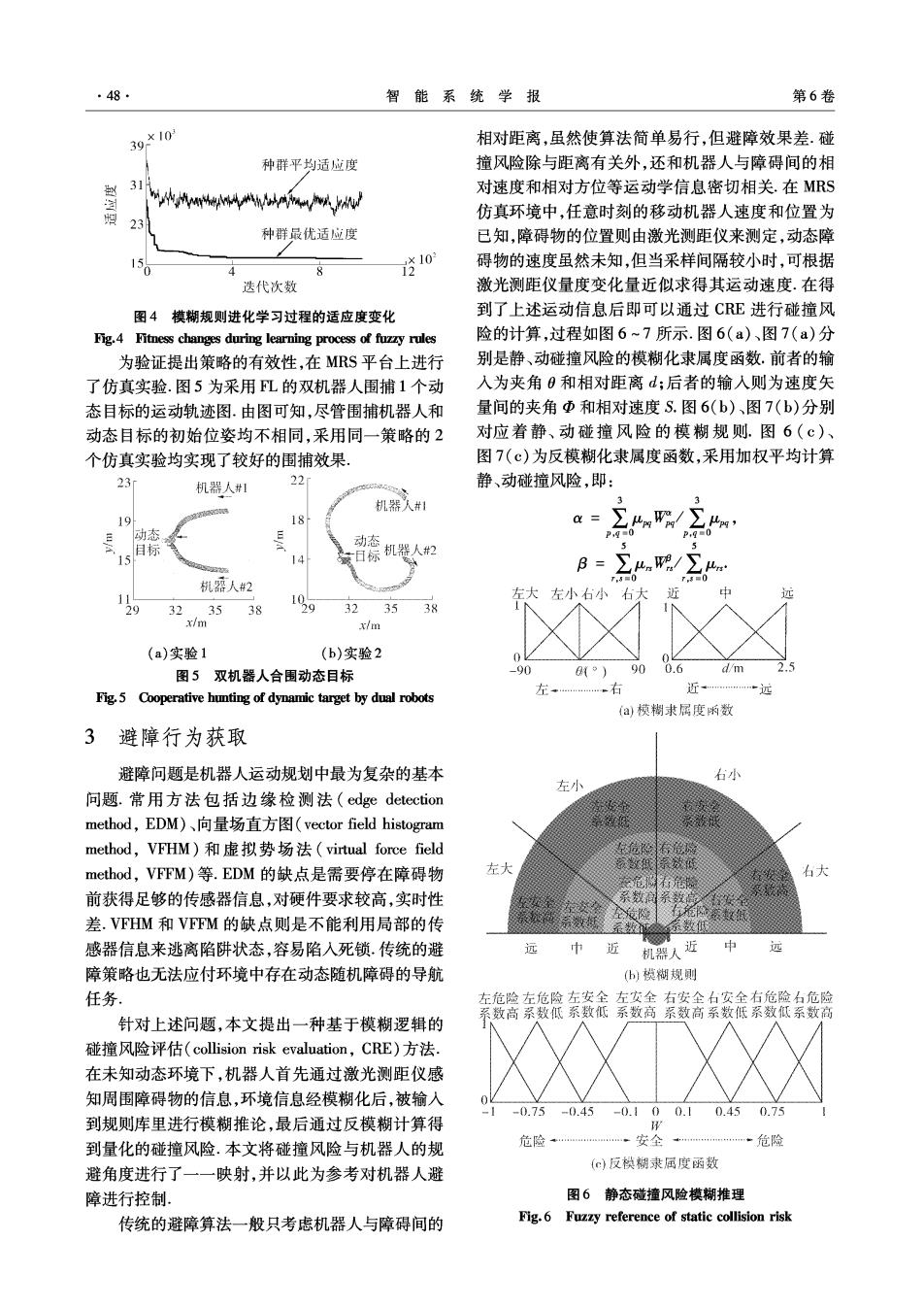
48 智能系统学报 第6卷 39*10 相对距离,虽然使算法简单易行,但避障效果差.碰 种群平均适应度 撞风险除与距离有关外,还和机器人与障碍间的相 31 wwwoy 对速度和相对方位等运动学信息密切相关.在MRS 仿真环境中,任意时刻的移动机器人速度和位置为 23 种群最优适应度 已知,障碍物的位置则由激光测距仪来测定,动态障 碍物的速度虽然未知,但当采样间隔较小时,可根据 迭代次数 激光测距仪量度变化量近似求得其运动速度.在得 图4模糊规则进化学习过程的适应度变化 到了上述运动信息后即可以通过CRE进行碰撞风 Fig.4 Fitness changes during learning process of fuzzy rules 险的计算,过程如图6~7所示.图6(a)、图7(a)分 为验证提出策略的有效性,在MRS平台上进行 别是静、动碰撞风险的模糊化隶属度函数.前者的输 了仿真实验.图5为采用FL的双机器人围捕1个动 入为夹角0和相对距离d;后者的输人则为速度矢 态目标的运动轨迹图.由图可知,尽管围捕机器人和 量间的夹角Φ和相对速度S.图6(b)、图7(b)分别 动态目标的初始位姿均不相同,采用同一策略的2 对应着静、动碰撞风险的模糊规则.图6(c)、 个仿真实验均实现了较好的围捕效果 图7(©)为反模糊化隶属度函数,采用加权平均计算 23 机器人1 22 静、动碰撞风险,即: 机器人#」 19 18 Q= 动态 动 P90 P,9■0 目标 5 5 15 14 日标机器人2 B=∑unw/∑ 机寤人#2 T,5=0 70 左大 左小右小石大 近 中 远 29 32 35 38 32 35 38 x/m x/m (a)实验1 (b)实验2 图5双机器人合围动态目标 90 a”) 90 0.6 左 …右 Fig.5 Cooperative hunting of dynamic target by dual robots 近远 (a)模糊求属度数 3避障行为获取 避障问题是机器人运动规划中最为复杂的基本 右小 左小 问题.常用方法包括边缘检测法(edge detection method,EDM)、向量场直方图(vector field histogram method,VFHM)和虚拟势场法(virtual force field 位 method,VFFM)等.EDM的缺点是需要停在障碍物 左大 原为 名大 花不 前获得足够的传感器信息,对硬件要求较高,实时性 系效系数 发 差.VFHM和VFFM的缺点则是不能利用局部的传 条数低 感器信息来逃离陷阱状态,容易陷入死锁.传统的避 交 近 机器人近 中 远 障策略也无法应付环境中存在动态随机障碍的导航 (h)模糊规则 任务. 左危险左危险左安全左交全右安全石安全右危险名危险 系数高系数低系数低系数高系数高系数低系数低系数高 针对上述问题,本文提出一种基于模糊逻辑的 碰撞风险评估(collision risk evaluation,CRE)方法. 在未知动态环境下,机器人首先通过激光测距仪感 知周围障碍物的信息,环境信息经模糊化后,被输入 -0.75-0.45-0.100.10.450.75 到规则库里进行模糊推论,最后通过反模糊计算得 到量化的碰撞风险.本文将碰撞风险与机器人的规 危险+…一安全一一危险 避角度进行了一一映射,并以此为参考对机器人避 (c)反模糊隶屈度函数 障进行控制。 图6静态碰撞风险模糊推理 传统的避障算法一般只考虑机器人与障碍间的 Fig.6 Fuzzy reference of static collision risk