正在加载图片...
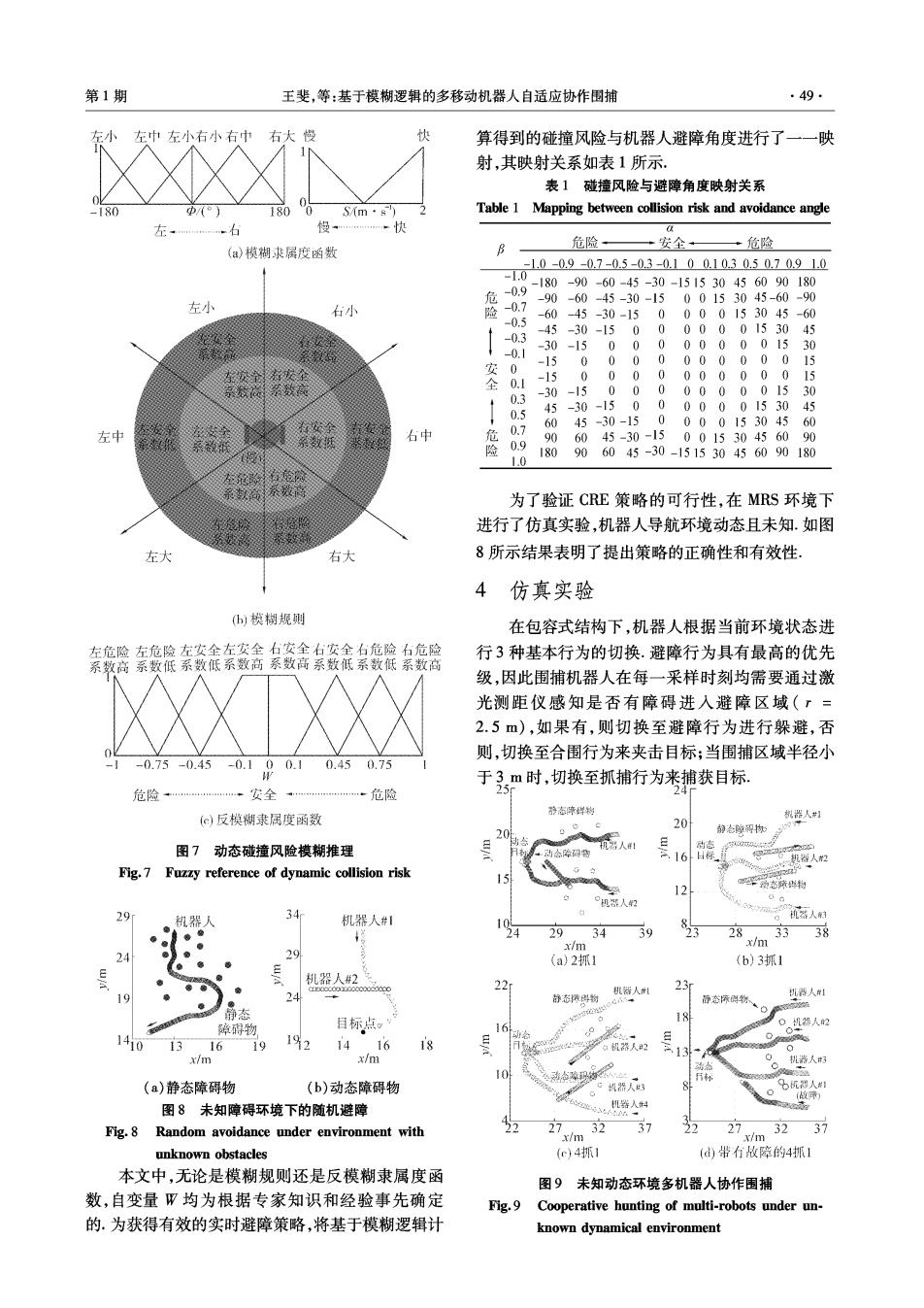
第1期 王斐,等:基于模糊逻辑的多移动机器人自适应协作围捕 ·49… 左小 左中左小右小右中右大慢 快 算得到的碰撞风险与机器人避障角度进行了一一映 射,其映射关系如表1所示. 表1碰撞风险与避障角度映射关系 Φ/ 180 SMm·s) Table 1 Mapping between collision risk and avoidance angle 左 石 慢 …一快 B 危险一 ·安全 +危险 (a模糊求属度函数 -1.0-0.9-0.7-0.5-03-0.10010.30.50.70.91.0 -1. -180-90-60-45-30-151530456090180 -0.9 左小 石小 险0.7 -90 -60-45-30-1500153045-60-90 -60 -45-30-150 000153045-60 -0.5 -0.3 -45-30-15000000153045 -30-15 0000000015 30 -0.1 安0 -15 0 00000000015 全0.1 -15 0 00000 000015 -30-15 0 0 00000015 0.3 30 0.5 45 -30 -15 0 000001530 60 45-30-1 ,0000153045 左中 石中 0.7 数不 90 6045-30-15001530456090 险 0.9 180 1.0 906045-30-151530456090180 为了验证CRE策略的可行性,在MRS环境下 进行了仿真实验,机器人导航环境动态且未知.如图 左大 右大 8所示结果表明了提出策略的正确性和有效性 4仿真实验 (凸)模糊规则 在包容式结构下,机器人根据当前环境状态进 左危险左危险左安全左安全石交全石安全右危险石危险 行3种基本行为的切换.避障行为具有最高的优先 系数高系数低系数低系数高系数高系数低系数低系数高 级,因此围捕机器人在每一采样时刻均需要通过激 光测距仪感知是否有障碍进入避障区域(r= 2.5m),如果有,则切换至避障行为进行躲避,否 则,切换至合围行为来夹击目标;当围捕区域半径小 -0.75-0.45-0.100.10.450.7 于3m时,切换至抓捕行为来捕获目标。 危险… 安全 …危险 (c)反模糊隶属度函数 机器人种】 20 静念膜阁 图7动态碰撞风险模糊推理 动态 三16H标 Fig.7 Fuzzy reference of dynamic collision risk 12 态麻供物 机器人2 29 机器人 34 机2器人#1 29 34 39 28 38 x/m 24 费】 29 ● (a)2抓1 (b)3抓1 器人2 22 23 19 24 静态侯得物 机器人 卧态侨碍物 机海人#1 静态 障碍物 标点。 18 1410 160 13 16 19 142 14 16 18 x/m x/m 三13- 0 0 机器人#3 10 (a)静态障碍物 (b)动态障碍物 。机器人好 马杭程人#1 图8未知障碍环境下的随机避障 Fig.8 Random avoidance under environment with 27 32 3> 22 27 3237 x/m x/m unknown obstacles (c)4抓1 (d带行故辟的4抓1 本文中,无论是模糊规则还是反模糊隶属度函 图9未知动态环境多机器人协作围捕 数,自变量W均为根据专家知识和经验事先确定 Fig.9 Cooperative hunting of multi-robots under un- 的.为获得有效的实时避障策略,将基于模糊逻辑计 known dynamical environment