正在加载图片...
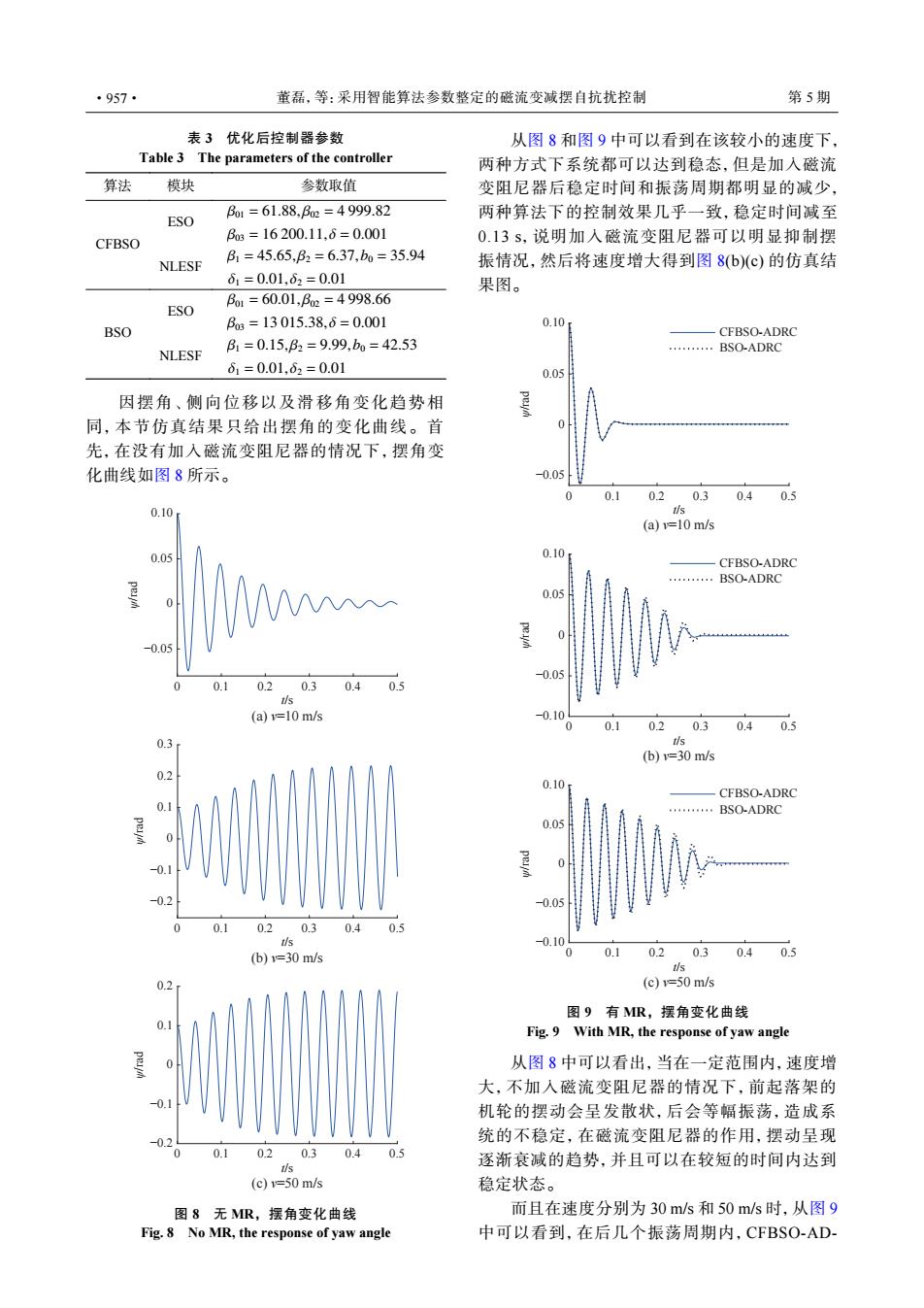
·957· 董磊,等:采用智能算法参数整定的磁流变诚摆自抗扰控制 第5期 表3优化后控制器参数 从图8和图9中可以看到在该较小的速度下, Table 3 The parameters of the controller 两种方式下系统都可以达到稳态,但是加入磁流 算法 模块 参数取值 变阻尼器后稳定时间和振荡周期都明显的减少, B1=61.88,B2=4999.82 两种算法下的控制效果几乎一致,稳定时间减至 ESO CFBSO 6=16200.11,6=0.001 0.13s,说明加入磁流变阻尼器可以明显抑制摆 B1=45.65,B2=6.37,b=35.94 NLESF 振情况,然后将速度增大得到图8(b)(©)的仿真结 61=0.01,62=0.01 果图。 ESO B1=60.01,Pm=4998.66 63=13015.38.6=0.001 0.10 BSO -CFBSO-ADRC B1=0.15,B2=9.99,b=42.53 NLESF …BSO-ADRC 61=0.01,62=0.01 0.05 因摆角、侧向位移以及滑移角变化趋势相 同,本节仿真结果只给出摆角的变化曲线。首 先,在没有加入磁流变阻尼器的情况下,摆角变 化曲线如图8所示。 -0.05 0 0.1 0.20.3 0.40.5 0.10 t/s (a)v=10 m/s 0.05 0.10 CFBSO-ADRC .........BSO-ADRC 0.05 0.05 -0.05 0.1 0.2 0.3 0.40.5 (a)1=l0m/s -0.10 0 0.1 0.20.3 0.40.5 0.3 s (b)=30m/s 0.2 0.10 CFBSO-ADRC ·BSO-ADRC 0.05 02 0.05 01 0.2 0.3 0.4 0.5 -0.10 (b)1=30m/s 0.1 0.2 0.3 0.40.5 02 (c)=50m/s 图9有MR,摆角变化曲线 Fig.9 With MR,the response of yaw angle 从图8中可以看出,当在一定范围内,速度增 大,不加入磁流变阻尼器的情况下,前起落架的 机轮的摆动会呈发散状,后会等幅振荡,造成系 0.2 统的不稳定,在磁流变阻尼器的作用,摆动呈现 0.1 0.2 0.3 0.4 0.5 逐渐衰减的趋势,并且可以在较短的时间内达到 (c)1=50m/s 稳定状态。 图8无MR,摆角变化曲线 而且在速度分别为30m/s和50m/s时,从图9 Fig.8 No MR,the response of yaw angle 中可以看到,在后几个振荡周期内,CFB$O-AD-表 3 优化后控制器参数 Table 3 The parameters of the controller 算法 模块 参数取值 CFBSO ESO β01 = 61.88, β02 = 4 999.82 β03 = 16 200.11,δ = 0.001 NLESF β1 = 45.65, β2 = 6.37,b0 = 35.94 δ1 = 0.01,δ2 = 0.01 BSO ESO β01 = 60.01, β02 = 4 998.66 β03 = 13 015.38,δ = 0.001 NLESF β1 = 0.15, β2 = 9.99,b0 = 42.53 δ1 = 0.01,δ2 = 0.01 因摆角、侧向位移以及滑移角变化趋势相 同,本节仿真结果只给出摆角的变化曲线。首 先,在没有加入磁流变阻尼器的情况下,摆角变 化曲线如图 8 所示。 0 0.1 0.2 0.3 0.4 0.5 t/s (a) v=10 m/s −0.05 0 0.05 0.10 ψ/rad 0 0.1 0.2 0.3 0.4 0.5 t/s (b) v=30 m/s ψ/rad −0.2 −0.1 0 0.1 0.2 0.3 0 0.1 0.2 0.3 0.4 0.5 t/s (c) v=50 m/s ψ/rad −0.2 −0.1 0 0.1 0.2 图 8 无 MR,摆角变化曲线 Fig. 8 No MR, the response of yaw angle 从图 8 和图 9 中可以看到在该较小的速度下, 两种方式下系统都可以达到稳态,但是加入磁流 变阻尼器后稳定时间和振荡周期都明显的减少, 两种算法下的控制效果几乎一致,稳定时间减至 0.13 s,说明加入磁流变阻尼器可以明显抑制摆 振情况,然后将速度增大得到图 8(b)(c) 的仿真结 果图。 0 0.1 0.2 0.3 0.4 0.5 t/s (a) v=10 m/s −0.05 0 0.05 0.10 ψ/rad CFBSO-ADRC BSO-ADRC 0 0.1 0.2 0.3 0.4 0.5 t/s (c) v=50 m/s −0.05 −0.10 0 0.05 0.10 ψ/rad CFBSO-ADRC BSO-ADRC 0 0.1 0.2 0.3 0.4 0.5 t/s (b) v=30 m/s −0.05 −0.10 0 0.05 0.10 ψ/rad CFBSO-ADRC BSO-ADRC 图 9 有 MR,摆角变化曲线 Fig. 9 With MR, the response of yaw angle 从图 8 中可以看出,当在一定范围内,速度增 大,不加入磁流变阻尼器的情况下,前起落架的 机轮的摆动会呈发散状,后会等幅振荡,造成系 统的不稳定,在磁流变阻尼器的作用,摆动呈现 逐渐衰减的趋势,并且可以在较短的时间内达到 稳定状态。 而且在速度分别为 30 m/s 和 50 m/s 时,从图 9 中可以看到,在后几个振荡周期内,CFBSO-AD- ·957· 董磊,等:采用智能算法参数整定的磁流变减摆自抗扰控制 第 5 期