正在加载图片...
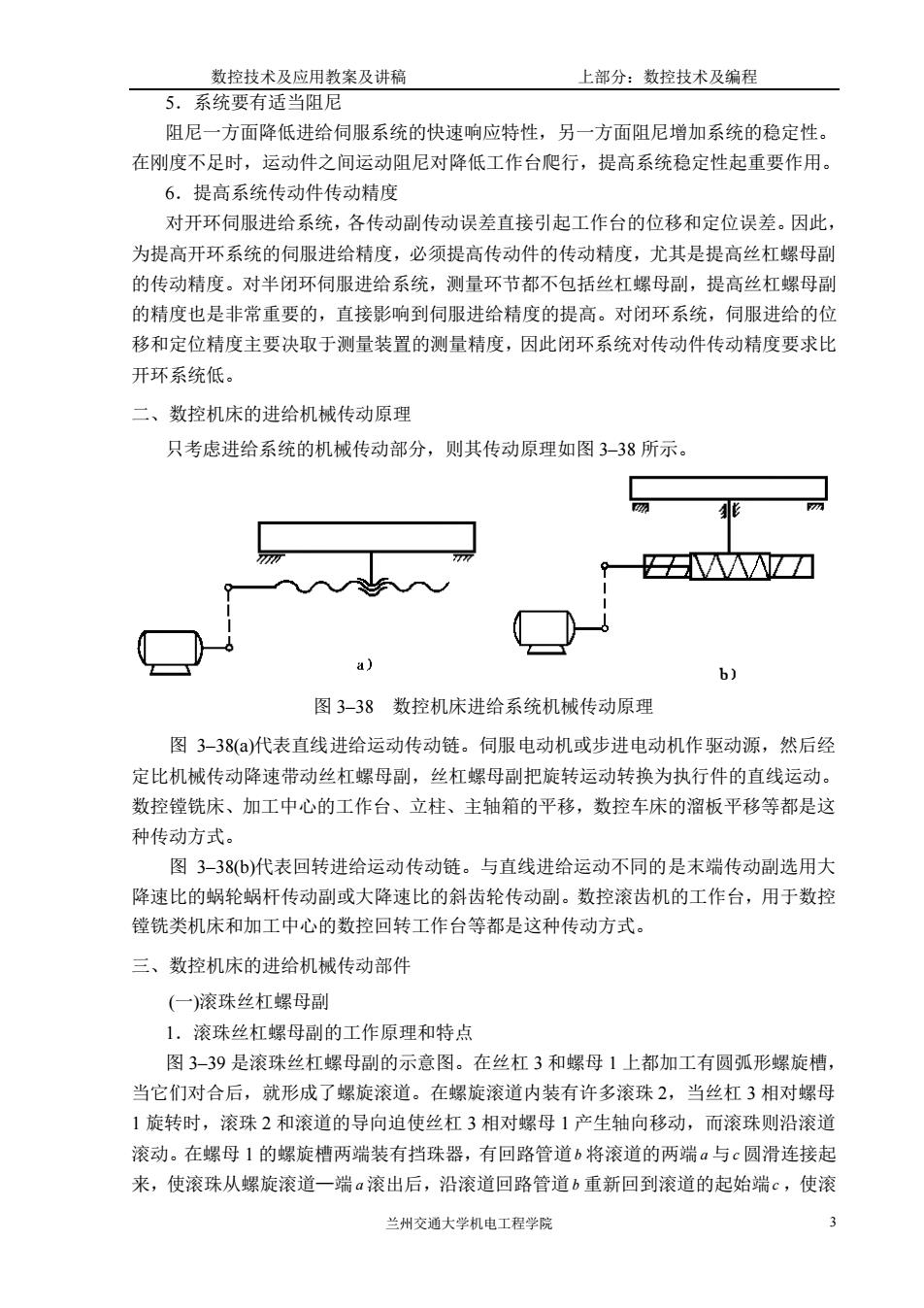
数控技术及应用教案及讲稿 上部分:数控技术及编程 5.系统要有话当阻尼 阻尼一方面降低进给伺服系统的快速响应特性,另一方面阻尼增加系统的稳定性。 在刚度不足时,运动件之间运动阻尼对降低工作台爬行,提高系统稳定性起重要作用。 6.提高系统传动件传动精度 对开环伺服进给系统,各传动副传动误差直接引起工作台的位移和定位误差。因此, 为提高开环系统的伺服进给精度,必须提高传动件的传动精度,尤其是提高丝杠螺母副 的传动精度。对半闭环伺服进给系统,测量环节都不包括丝杠螺母副,提高丝杠螺母副 的精度也是非常重要的,直接影响到伺服进给精度的提高。对闭环系统,伺服进给的位 移和定位精度主要决取于测量装置的测量精度,因此闭环系统对传动件传动精度要求比 开环系统低。 二、数控机床的进给机械传动原理 只考虑进给系统的机械传动部分,则其传动原理如图3-38所示。 ?I个刀 图3-38数控机床进给系统机械传动原理 图3-38()代表直线进给运动传动链。伺服电动机或步进电动机作驱动源,然后经 定比机械传动降速带动丝杠螺母副,丝杠螺母副把旋转运动转换为执行件的直线运动。 数控镗铣床、加工中心的工作台、立柱、主轴箱的平移,数控车床的溜板平移等都是这 种传动方式。 图3-38b)代表回转进给运动传动链。与直线进给运动不同的是末端传动副选用大 降速比的蜗轮蜗杆传动副或大降速比的斜齿轮传动副。数控滚齿机的工作台,用于数控 镗铣类机床和加工中心的数控回转工作台等都是这种传动方式。 三、数控机床的进给机械传动部件 (一)滚珠丝杠螺母副 1.滚珠丝杠螺母副的工作原理和特点 图3-39是滚珠丝杠螺母副的示意图。在丝杠3和螺母1上都加工有圆弧形螺旋槽, 当它们对合后,就形成了螺旋滚道。在螺旋滚道内装有许多滚珠2,当丝杠3相对螺母 1旋转时,滚珠2和滚道的导向迫使丝杠3相对螺母1产生轴向移动,而滚珠则沿滚道 滚动。在螺母1的螺旋槽两端装有挡珠器,有回路管道b将滚道的两端α与c圆滑连接起 来,使滚珠从螺旋滚道一端滚出后,沿滚道回路管道b重新回到滚道的起始端,使滚 兰州交通大学机电工程学院数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 3 5.系统要有适当阻尼 阻尼一方面降低进给伺服系统的快速响应特性,另一方面阻尼增加系统的稳定性。 在刚度不足时,运动件之间运动阻尼对降低工作台爬行,提高系统稳定性起重要作用。 6.提高系统传动件传动精度 对开环伺服进给系统,各传动副传动误差直接引起工作台的位移和定位误差。因此, 为提高开环系统的伺服进给精度,必须提高传动件的传动精度,尤其是提高丝杠螺母副 的传动精度。对半闭环伺服进给系统,测量环节都不包括丝杠螺母副,提高丝杠螺母副 的精度也是非常重要的,直接影响到伺服进给精度的提高。对闭环系统,伺服进给的位 移和定位精度主要决取于测量装置的测量精度,因此闭环系统对传动件传动精度要求比 开环系统低。 二、数控机床的进给机械传动原理 只考虑进给系统的机械传动部分,则其传动原理如图 3–38 所示。 图 3–38 数控机床进给系统机械传动原理 图 3–38(a)代表直线进给运动传动链。伺服电动机或步进电动机作驱动源,然后经 定比机械传动降速带动丝杠螺母副,丝杠螺母副把旋转运动转换为执行件的直线运动。 数控镗铣床、加工中心的工作台、立柱、主轴箱的平移,数控车床的溜板平移等都是这 种传动方式。 图 3–38(b)代表回转进给运动传动链。与直线进给运动不同的是末端传动副选用大 降速比的蜗轮蜗杆传动副或大降速比的斜齿轮传动副。数控滚齿机的工作台,用于数控 镗铣类机床和加工中心的数控回转工作台等都是这种传动方式。 三、数控机床的进给机械传动部件 (一)滚珠丝杠螺母副 1.滚珠丝杠螺母副的工作原理和特点 图 3–39 是滚珠丝杠螺母副的示意图。在丝杠 3 和螺母 1 上都加工有圆弧形螺旋槽, 当它们对合后,就形成了螺旋滚道。在螺旋滚道内装有许多滚珠 2,当丝杠 3 相对螺母 1 旋转时,滚珠 2 和滚道的导向迫使丝杠 3 相对螺母 1 产生轴向移动,而滚珠则沿滚道 滚动。在螺母 1 的螺旋槽两端装有挡珠器,有回路管道 b 将滚道的两端 a 与 c 圆滑连接起 来,使滚珠从螺旋滚道—端 a 滚出后,沿滚道回路管道 b 重新回到滚道的起始端 c ,使滚