正在加载图片...
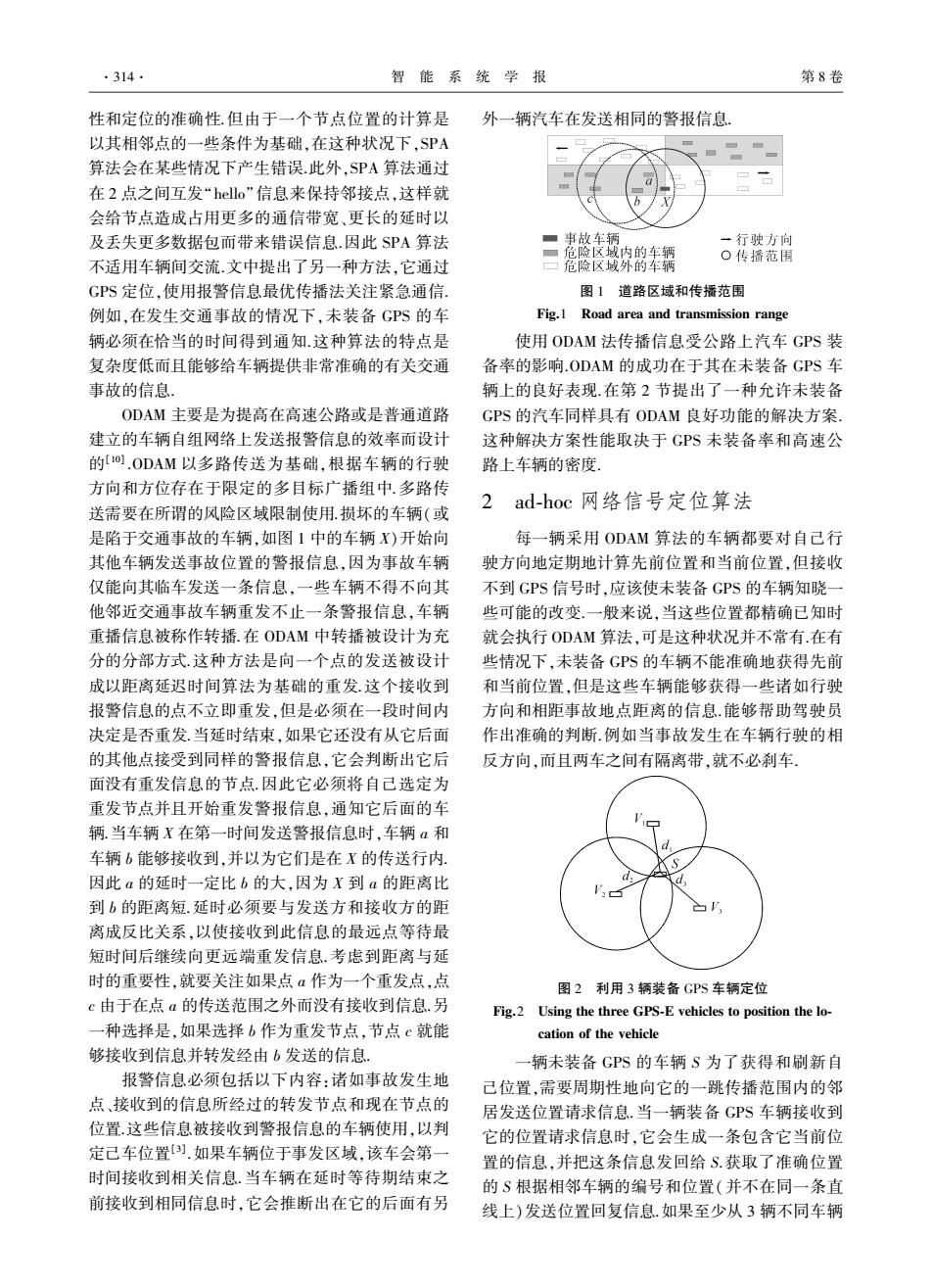
·314. 智能系统学报 第8卷 性和定位的准确性但由于一个节点位置的计算是 外一辆汽车在发送相同的警报信息 以其相邻点的一些条件为基础,在这种状况下,SPA 算法会在某些情况下产生错误.此外,SPA算法通过 在2点之间互发“hello'”信息来保持邻接点,这样就 会给节点造成占用更多的通信带宽、更长的延时以 及丢失更多数据包而带来错误信息.因此SPA算法 ■事故车辆 一行驶方向 ■危险区域内的车辆 不适用车辆间交流文中提出了另一种方法,它通过 危险区域外的车辆 O传播范围 GPS定位,使用报警信息最优传播法关注紧急通信 图1道路区域和传播范围 例如,在发生交通事故的情况下,未装备GPS的车 Fig.1 Road area and transmission range 辆必须在恰当的时间得到通知.这种算法的特点是 使用ODAM法传播信息受公路上汽车GPS装 复杂度低而且能够给车辆提供非常准确的有关交通 备率的影响.ODAM的成功在于其在未装备GPS车 事故的信息 辆上的良好表现.在第2节提出了一种允许未装备 ODAM主要是为提高在高速公路或是普通道路 GPS的汽车同样具有ODAM良好功能的解决方案. 建立的车辆自组网络上发送报警信息的效率而设计 这种解决方案性能取决于GPS未装备率和高速公 的o).ODAM以多路传送为基础,根据车辆的行驶 路上车辆的密度, 方向和方位存在于限定的多目标广播组中.多路传 2ad-hoc网络信号定位算法 送需要在所谓的风险区域限制使用损坏的车辆(或 是陷于交通事故的车辆,如图1中的车辆X)开始向 每一辆采用ODAM算法的车辆都要对自己行 其他车辆发送事故位置的警报信息,因为事故车辆 驶方向地定期地计算先前位置和当前位置,但接收 仅能向其临车发送一条信息,一些车辆不得不向其 不到GPS信号时,应该使未装备GPS的车辆知晓一 他邻近交通事故车辆重发不止一条警报信息,车辆 些可能的改变.一般来说,当这些位置都精确已知时 重播信息被称作转播.在ODAM中转播被设计为充 就会执行ODAM算法,可是这种状况并不常有.在有 分的分部方式.这种方法是向一个点的发送被设计 些情况下,未装备GPS的车辆不能准确地获得先前 成以距离延迟时间算法为基础的重发.这个接收到 和当前位置,但是这些车辆能够获得一些诸如行驶 报警信息的点不立即重发,但是必须在一段时间内 方向和相距事故地点距离的信息.能够帮助驾驶员 决定是否重发.当延时结束,如果它还没有从它后面 作出准确的判断.例如当事故发生在车辆行驶的相 的其他点接受到同样的警报信息,它会判断出它后 反方向,而且两车之间有隔离带,就不必刹车。 面没有重发信息的节点.因此它必须将自己选定为 重发节点并且开始重发警报信息,通知它后面的车 辆.当车辆X在第一时间发送警报信息时,车辆α和 车辆b能够接收到,并以为它们是在X的传送行内 因此a的延时一定比b的大,因为X到a的距离比 到b的距离短.延时必须要与发送方和接收方的距 离成反比关系,以使接收到此信息的最远点等待最 短时间后继续向更远端重发信息.考虑到距离与延 时的重要性,就要关注如果点a作为一个重发点,点 图2利用3辆装备GPS车辆定位 c由于在点a的传送范围之外而没有接收到信息.另 Fig.2 Using the three GPS-E vehicles to position the lo- 一种选择是,如果选择b作为重发节点,节点c就能 cation of the vehicle 够接收到信息并转发经由b发送的信息 一辆未装备GPS的车辆S为了获得和刷新自 报警信息必须包括以下内容:诸如事故发生地 己位置,需要周期性地向它的一跳传播范围内的邻 点、接收到的信息所经过的转发节点和现在节点的 居发送位置请求信息.当一辆装备GPS车辆接收到 位置这些信息被接收到警报信息的车辆使用,以判 它的位置请求信息时,它会生成一条包含它当前位 定己车位置[).如果车辆位于事发区域,该车会第一 置的信息,并把这条信息发回给S.获取了准确位置 时间接收到相关信息.当车辆在延时等待期结束之 的S根据相邻车辆的编号和位置(并不在同一条直 前接收到相同信息时,它会推断出在它的后面有另 线上)发送位置回复信息.如果至少从3辆不同车辆性和定位的准确性.但由于一个节点位置的计算是 以其相邻点的一些条件为基础,在这种状况下,SPA 算法会在某些情况下产生错误.此外,SPA 算法通过 在 2 点之间互发“hello”信息来保持邻接点,这样就 会给节点造成占用更多的通信带宽、更长的延时以 及丢失更多数据包而带来错误信息.因此 SPA 算法 不适用车辆间交流.文中提出了另一种方法,它通过 GPS 定位,使用报警信息最优传播法关注紧急通信. 例如,在发生交通事故的情况下,未装备 GPS 的车 辆必须在恰当的时间得到通知.这种算法的特点是 复杂度低而且能够给车辆提供非常准确的有关交通 事故的信息. ODAM 主要是为提高在高速公路或是普通道路 建立的车辆自组网络上发送报警信息的效率而设计 的[10] .ODAM 以多路传送为基础,根据车辆的行驶 方向和方位存在于限定的多目标广播组中.多路传 送需要在所谓的风险区域限制使用.损坏的车辆(或 是陷于交通事故的车辆,如图 1 中的车辆 X)开始向 其他车辆发送事故位置的警报信息,因为事故车辆 仅能向其临车发送一条信息,一些车辆不得不向其 他邻近交通事故车辆重发不止一条警报信息,车辆 重播信息被称作转播.在 ODAM 中转播被设计为充 分的分部方式.这种方法是向一个点的发送被设计 成以距离延迟时间算法为基础的重发.这个接收到 报警信息的点不立即重发,但是必须在一段时间内 决定是否重发.当延时结束,如果它还没有从它后面 的其他点接受到同样的警报信息,它会判断出它后 面没有重发信息的节点.因此它必须将自己选定为 重发节点并且开始重发警报信息,通知它后面的车 辆.当车辆 X 在第一时间发送警报信息时,车辆 a 和 车辆 b 能够接收到,并以为它们是在 X 的传送行内. 因此 a 的延时一定比 b 的大,因为 X 到 a 的距离比 到 b 的距离短.延时必须要与发送方和接收方的距 离成反比关系,以使接收到此信息的最远点等待最 短时间后继续向更远端重发信息.考虑到距离与延 时的重要性,就要关注如果点 a 作为一个重发点,点 c 由于在点 a 的传送范围之外而没有接收到信息.另 一种选择是,如果选择 b 作为重发节点,节点 c 就能 够接收到信息并转发经由 b 发送的信息. 报警信息必须包括以下内容:诸如事故发生地 点、接收到的信息所经过的转发节点和现在节点的 位置.这些信息被接收到警报信息的车辆使用,以判 定己车位置[3] .如果车辆位于事发区域,该车会第一 时间接收到相关信息.当车辆在延时等待期结束之 前接收到相同信息时,它会推断出在它的后面有另 外一辆汽车在发送相同的警报信息. 图 1 道路区域和传播范围 Fig.1 Road area and transmission range 使用 ODAM 法传播信息受公路上汽车 GPS 装 备率的影响.ODAM 的成功在于其在未装备 GPS 车 辆上的良好表现.在第 2 节提出了一种允许未装备 GPS 的汽车同样具有 ODAM 良好功能的解决方案. 这种解决方案性能取决于 GPS 未装备率和高速公 路上车辆的密度. 2 ad⁃hoc 网络信号定位算法 每一辆采用 ODAM 算法的车辆都要对自己行 驶方向地定期地计算先前位置和当前位置,但接收 不到 GPS 信号时,应该使未装备 GPS 的车辆知晓一 些可能的改变.一般来说,当这些位置都精确已知时 就会执行 ODAM 算法,可是这种状况并不常有.在有 些情况下,未装备 GPS 的车辆不能准确地获得先前 和当前位置,但是这些车辆能够获得一些诸如行驶 方向和相距事故地点距离的信息.能够帮助驾驶员 作出准确的判断.例如当事故发生在车辆行驶的相 反方向,而且两车之间有隔离带,就不必刹车. 图 2 利用 3 辆装备 GPS 车辆定位 Fig.2 Using the three GPS⁃E vehicles to position the lo⁃ cation of the vehicle 一辆未装备 GPS 的车辆 S 为了获得和刷新自 己位置,需要周期性地向它的一跳传播范围内的邻 居发送位置请求信息.当一辆装备 GPS 车辆接收到 它的位置请求信息时,它会生成一条包含它当前位 置的信息,并把这条信息发回给 S.获取了准确位置 的 S 根据相邻车辆的编号和位置(并不在同一条直 线上)发送位置回复信息.如果至少从 3 辆不同车辆 ·314· 智 能 系 统 学 报 第 8 卷