正在加载图片...
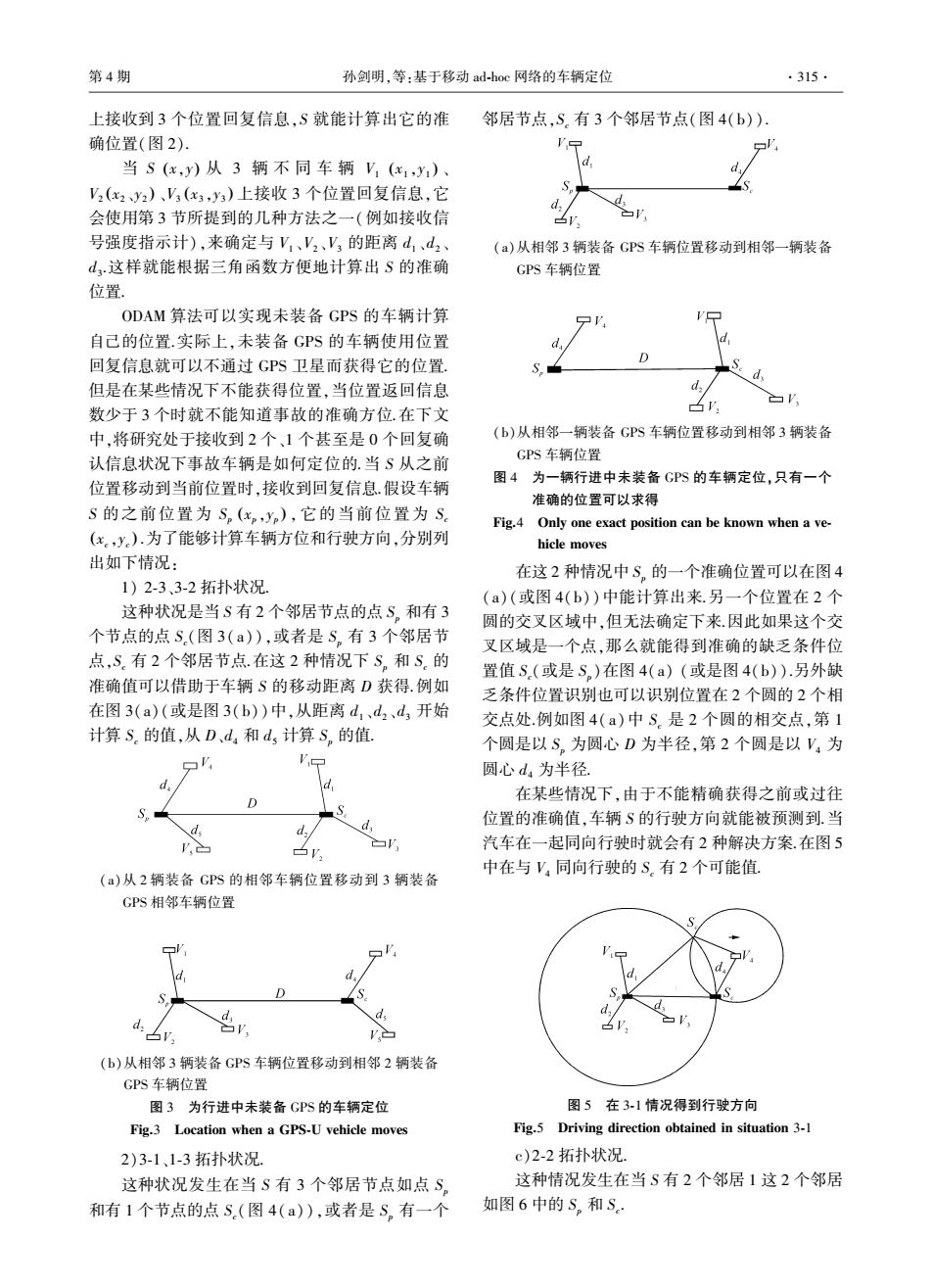
第4期 孙剑明,等:基于移动ad-hoc网络的车辆定位 ·315- 上接收到3个位置回复信息,S就能计算出它的准 邻居节点,S。有3个邻居节点(图4(b). 确位置(图2). 当S(x,y)从3辆不同车辆V,(x1y)、 V2(x2y2)、V(x3,y3)上接收3个位置回复信息,它 会使用第3节所提到的几种方法之一(例如接收信 号强度指示计),来确定与V、V2、V3的距离d、d2、 (a)从相邻3辆装备GPS车辆位置移动到相邻一辆装备 d这样就能根据三角函数方便地计算出S的准确 GPS车辆位置 位置. ODAM算法可以实现未装备GPS的车辆计算 自己的位置.实际上,未装备GPS的车辆使用位置 回复信息就可以不通过GPS卫星而获得它的位置. D 但是在某些情况下不能获得位置,当位置返回信息 数少于3个时就不能知道事故的准确方位.在下文 中,将研究处于接收到2个、1个甚至是0个回复确 (b)从相邻一辆装备GPS车辆位置移动到相邻3辆装备 认信息状况下事故车辆是如何定位的.当S从之前 GPS车辆位置 图4为一辆行进中未装备GPS的车辆定位,只有一个 位置移动到当前位置时,接收到回复信息.假设车辆 准确的位置可以求得 S的之前位置为S,(x,,),它的当前位置为S。 Fig.4 Only one exact position can be known when a ve- (x。y).为了能够计算车辆方位和行驶方向,分别列 hicle moves 出如下情况: 在这2种情况中S。的一个准确位置可以在图4 1)2-3、3-2拓扑状况 (a)(或图4(b))中能计算出来.另一个位置在2个 这种状况是当S有2个邻居节点的点S。和有3 圆的交叉区域中,但无法确定下来.因此如果这个交 个节点的点S.(图3(a)),或者是S,有3个邻居节 叉区域是一个点,那么就能得到准确的缺乏条件位 点,S。有2个邻居节点.在这2种情况下S。和S。的 置值S.(或是S,)在图4(a)(或是图4(b)).另外缺 准确值可以借助于车辆S的移动距离D获得.例如 乏条件位置识别也可以识别位置在2个圆的2个相 在图3(a)(或是图3(b))中,从距离d1、d2、d开始 交点处.例如图4(a)中S。是2个圆的相交点,第1 计算S.的值,从D、d和d,计算S,的值. 个圆是以S。为圆心D为半径,第2个圆是以V,为 圆心d为半径. D 在某些情况下,由于不能精确获得之前或过往 位置的准确值,车辆S的行驶方向就能被预测到.当 汽车在一起同向行驶时就会有2种解决方案.在图5 中在与V,同向行驶的S,有2个可能值. (a)从2辆装备GPS的相邻车辆位置移动到3辆装备 GPS相邻车辆位置 d V白 (b)从相邻3辆装备GPS车辆位置移动到相邻2辆装备 GPS车辆位置 图3为行进中未装备GPS的车辆定位 图5在3-1情况得到行驶方向 Fig.3 Location when a GPS-U vehicle moves Fig.5 Driving direction obtained in situation 3-1 2)3-1、1-3拓扑状况 c)2-2拓扑状况. 这种状况发生在当S有3个邻居节点如点S 这种情况发生在当S有2个邻居1这2个邻居 和有1个节点的点S(图4(a),或者是S。有一个 如图6中的S,和S上接收到 3 个位置回复信息,S 就能计算出它的准 确位置(图 2). 当 S (x,y) 从 3 辆 不 同 车 辆 V1 x1 ,y1 ( ) 、 V2 x2 、y2 ( ) 、V3 x3 ,y3 ( ) 上接收 3 个位置回复信息,它 会使用第 3 节所提到的几种方法之一(例如接收信 号强度指示计),来确定与 V1 、V2 、V3 的距离 d1 、d2 、 d3 .这样就能根据三角函数方便地计算出 S 的准确 位置. ODAM 算法可以实现未装备 GPS 的车辆计算 自己的位置.实际上,未装备 GPS 的车辆使用位置 回复信息就可以不通过 GPS 卫星而获得它的位置. 但是在某些情况下不能获得位置,当位置返回信息 数少于 3 个时就不能知道事故的准确方位.在下文 中,将研究处于接收到 2 个、1 个甚至是 0 个回复确 认信息状况下事故车辆是如何定位的.当 S 从之前 位置移动到当前位置时,接收到回复信息.假设车辆 S 的之前位置为 Sp xp,yp ( ) , 它的当前位置为 Sc xc,yc ( ) .为了能够计算车辆方位和行驶方向,分别列 出如下情况: 1) 2⁃3、3⁃2 拓扑状况. 这种状况是当 S 有 2 个邻居节点的点 Sp 和有 3 个节点的点 Sc(图 3( a)),或者是 Sp 有 3 个邻居节 点,Sc 有 2 个邻居节点.在这 2 种情况下 Sp 和 Sc 的 准确值可以借助于车辆 S 的移动距离 D 获得.例如 在图 3(a)(或是图 3(b))中,从距离 d1 、d2 、d3 开始 计算 Sc 的值,从 D、d4 和 d5 计算 Sp 的值. (a)从 2 辆装备 GPS 的相邻车辆位置移动到 3 辆装备 GPS 相邻车辆位置 (b)从相邻 3 辆装备 GPS 车辆位置移动到相邻 2 辆装备 GPS 车辆位置 图 3 为行进中未装备 GPS 的车辆定位 Fig.3 Location when a GPS⁃U vehicle moves 2)3⁃1、1⁃3 拓扑状况. 这种状况发生在当 S 有 3 个邻居节点如点 Sp 和有 1 个节点的点 Sc(图 4( a)),或者是 Sp 有一个 邻居节点,Sc 有 3 个邻居节点(图 4(b)). (a)从相邻 3 辆装备 GPS 车辆位置移动到相邻一辆装备 GPS 车辆位置 (b)从相邻一辆装备 GPS 车辆位置移动到相邻 3 辆装备 GPS 车辆位置 图 4 为一辆行进中未装备 GPS 的车辆定位,只有一个 准确的位置可以求得 Fig.4 Only one exact position can be known when a ve⁃ hicle moves 在这 2 种情况中 Sp 的一个准确位置可以在图 4 (a)(或图 4(b))中能计算出来.另一个位置在 2 个 圆的交叉区域中,但无法确定下来.因此如果这个交 叉区域是一个点,那么就能得到准确的缺乏条件位 置值 Sc(或是 Sp)在图 4(a) (或是图 4(b)).另外缺 乏条件位置识别也可以识别位置在 2 个圆的 2 个相 交点处.例如图 4( a)中 Sc 是 2 个圆的相交点,第 1 个圆是以 Sp 为圆心 D 为半径,第 2 个圆是以 V4 为 圆心 d4 为半径. 在某些情况下,由于不能精确获得之前或过往 位置的准确值,车辆 S 的行驶方向就能被预测到.当 汽车在一起同向行驶时就会有 2 种解决方案.在图 5 中在与 V4 同向行驶的 Sc 有 2 个可能值. 图 5 在 3⁃1 情况得到行驶方向 Fig.5 Driving direction obtained in situation 3⁃1 c)2⁃2 拓扑状况. 这种情况发生在当 S 有 2 个邻居 1 这 2 个邻居 如图 6 中的 Sp 和 Sc . 第 4 期 孙剑明,等:基于移动 ad⁃hoc 网络的车辆定位 ·315·