正在加载图片...
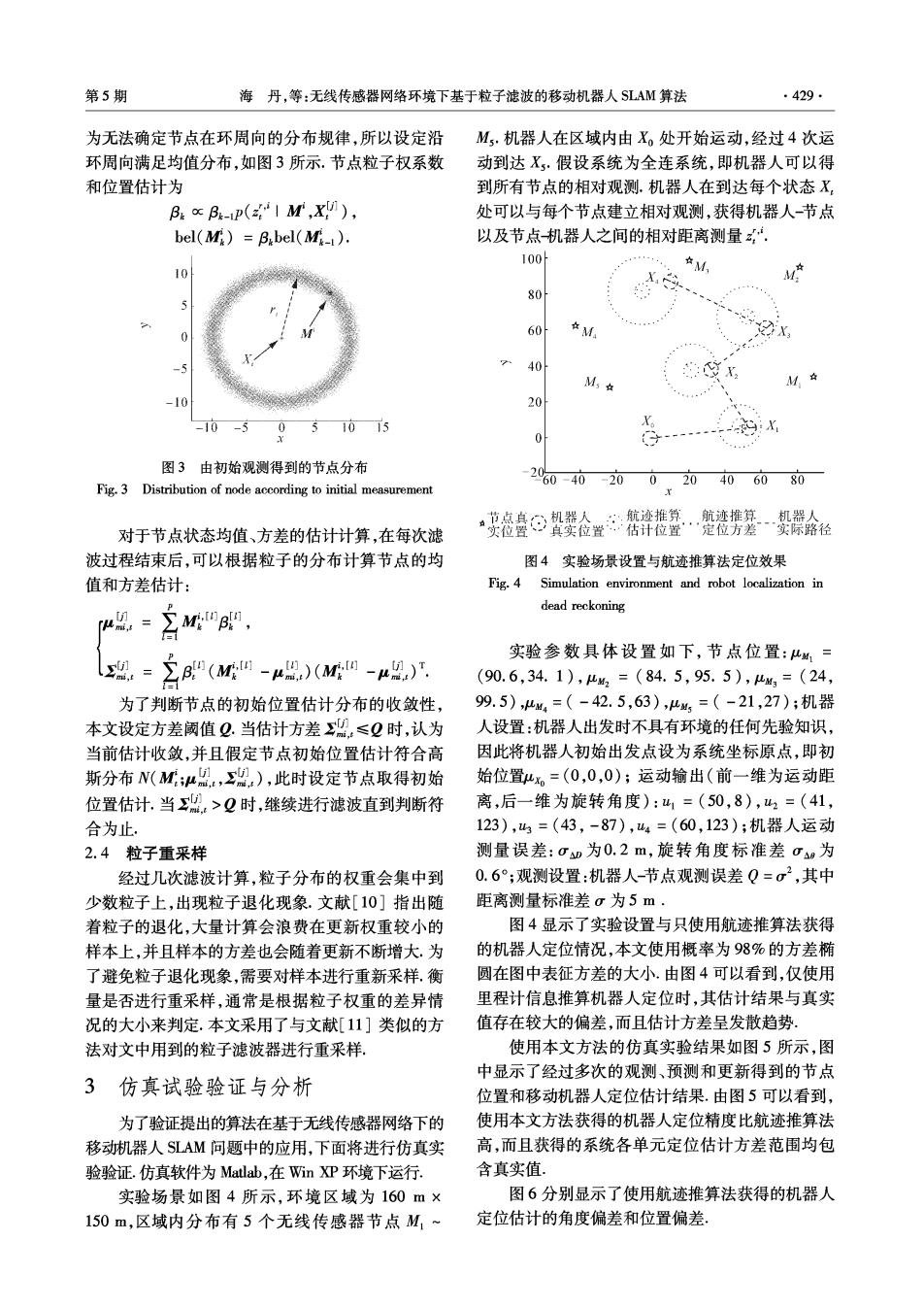
第5期 海丹,等:无线传感器网络环境下基于粒子滤波的移动机器人SLAM算法 ·429· 为无法确定节点在环周向的分布规律,所以设定沿 M,机器人在区域内由X。处开始运动,经过4次运 环周向满足均值分布,如图3所示.节点粒子权系数 动到达X·假设系统为全连系统,即机器人可以得 和位置估计为 到所有节点的相对观测.机器人在到达每个状态X, B:o B-up(M,xn), 处可以与每个节点建立相对观测,获得机器人-节点 bel(M)B.bel(M). 以及节点机器人之间的相对距离测量: 100 10 在M 80 60 在M 40 M5女 20 -0-595105 X 9X 0 图3由初始观测得到的节点分布 020406080 Fig.3 Distribution of node according to initial measurement 2060-40-20 对于节点状态均值、方差的估计计算,在每次滤 ·要瓷皇⊙贸要脸x然整整湾携要 机器人 ·定位方差…实际路径 波过程结束后,可以根据粒子的分布计算节点的均 图4实验场景设置与航迹推算法定位效果 值和方差估计: Fig.4 Simulation environment and robot localization in dead reckoning 品=店Gg, 实验参数具体设置如下,节点位置:“,三 盟.=立B9(M四-u)(M-u息)月 (90.6,34.1),u42=(84.5,95.5),w,=(24, 为了判断节点的初始位置估计分布的收敛性, 99.5)w4=(-42.5,63),4,=(-21,27);机器 本文设定方差阈值Q.当估计方差四≤Q时,认为 人设置:机器人出发时不具有环境的任何先验知识, 当前估计收敛,并且假定节点初始位置估计符合高 因此将机器人初始出发点设为系统坐标原点,即初 斯分布N(M:,品),此时设定节点取得初始 始位置x。=(0,0,0);运动输出(前一维为运动距 位置估计.当>Q时,继续进行滤波直到判断符 离,后一维为旋转角度):山1=(50,8),山2=(41, 合为止、 123),=(43,-87),4=(60,123);机器人运动 2.4粒子重采样 测量误差:σ如为0.2m,旋转角度标准差04为 经过几次滤波计算,粒子分布的权重会集中到 0.6°;观测设置:机器人-节点观测误差Q=σ2,其中 少数粒子上,出现粒子退化现象.文献[10]指出随 距离测量标准差σ为5m. 着粒子的退化,大量计算会浪费在更新权重较小的 图4显示了实验设置与只使用航迹推算法获得 样本上,并且样本的方差也会随着更新不断增大.为 的机器人定位情况,本文使用概率为98%的方差椭 了避免粒子退化现象,需要对样本进行重新采样,衡 圆在图中表征方差的大小.由图4可以看到,仅使用 量是否进行重采样,通常是根据粒子权重的差异情 里程计信息推算机器人定位时,其估计结果与真实 况的大小来判定.本文采用了与文献[11]类似的方 值存在较大的偏差,而且估计方差呈发散趋势 法对文中用到的粒子滤波器进行重采样. 使用本文方法的仿真实验结果如图5所示,图 中显示了经过多次的观测、预测和更新得到的节点 3仿真试验验证与分析 位置和移动机器人定位估计结果.由图5可以看到, 为了验证提出的算法在基于无线传感器网络下的 使用本文方法获得的机器人定位精度比航迹推算法 移动机器人SLAM问题中的应用,下面将进行仿真实 高,而且获得的系统各单元定位估计方差范围均包 验验证.仿真软件为Matlab,在WinP环境下运行. 含真实值. 实验场景如图4所示,环境区域为160m× 图6分别显示了使用航迹推算法获得的机器人 150m,区域内分布有5个无线传感器节点M1~ 定位估计的角度偏差和位置偏差