正在加载图片...
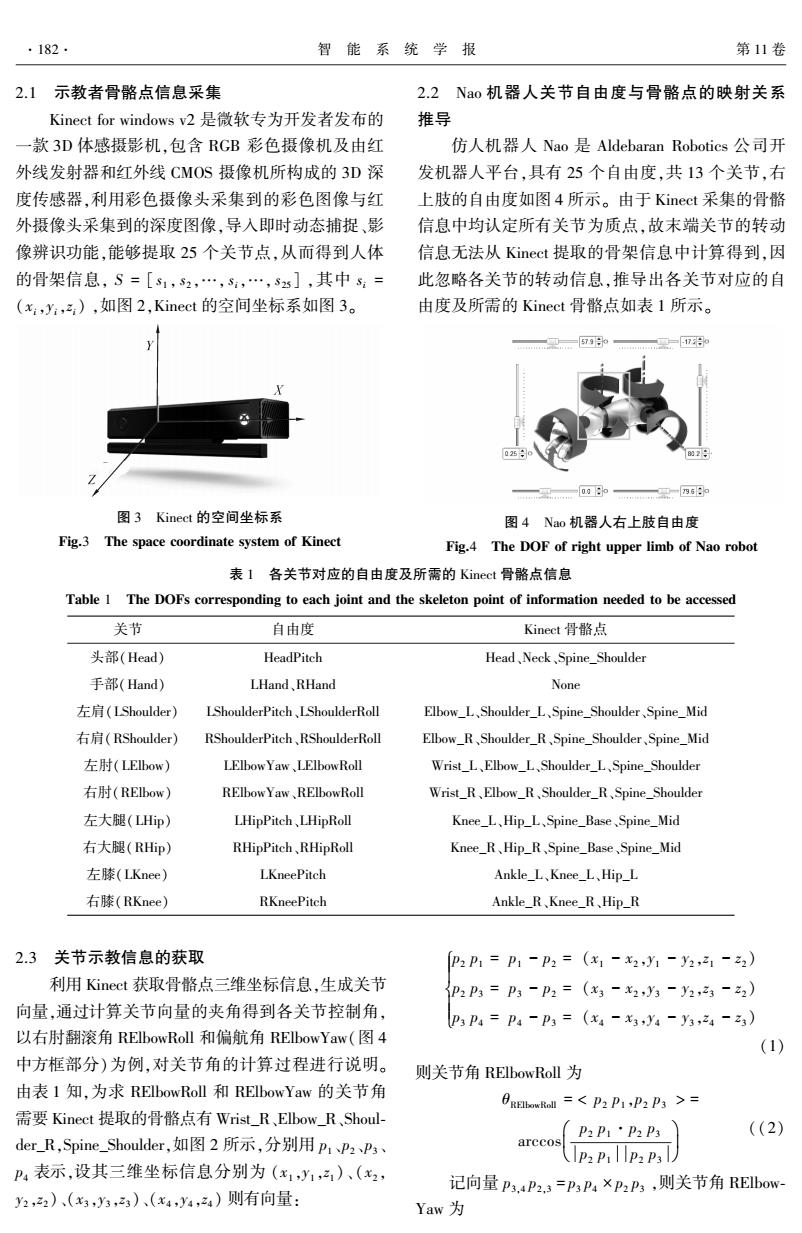
182 智能系统学报 第11卷 2.1示教者骨骼点信息采集 2.2Nao机器人关节自由度与骨骼点的映射关系 Kinect for windows v2是微软专为开发者发布的 推导 一款3D体感摄影机,包含RGB彩色摄像机及由红 仿人机器人Nao是Aldebaran Robotics公司开 外线发射器和红外线CMOS摄像机所构成的3D深 发机器人平台,具有25个自由度,共13个关节,右 度传感器,利用彩色摄像头采集到的彩色图像与红 上肢的自由度如图4所示。由于Kinect采集的骨骼 外摄像头采集到的深度图像,导入即时动态捕捉、影 信息中均认定所有关节为质点,故末端关节的转动 像辨识功能,能够提取25个关节点,从而得到人体 信息无法从Kinect提取的骨架信息中计算得到,因 的骨架信息,S=[s1,52,…,s,…,25],其中5= 此忽略各关节的转动信息,推导出各关节对应的自 (x,y,a;),如图2,Kinect的空间坐标系如图3。 由度及所需的Kinect骨骼点如表1所示。 579 78 0g :o 图3 Kinect的空间坐标系 图4Nao机器人右上肢自由度 Fig.3 The space coordinate system of Kinect Fig.4 The DOF of right upper limb of Nao robot 表I各关节对应的自由度及所需的Kinect骨骼点信息 Table 1 The DOFs corresponding to each joint and the skeleton point of information needed to be accessed 关节 自由度 Kinect骨骼点 头部(Head) HeadPitch Head、Neck、,Spine Shoulder 手部(Hand) LHand、RHand None 左肩(LShoulder) LShoulderPitch LShoulderRoll Elbow_.L、Shoulder_L、Spine_Shoulder、Spine_.Mid 右肩(RShoulder) RShoulderPitch RShoulderRoll Elbow._R、Shoulder_.R、Spine_.Shoulder、Spine_.Mid 左肘(LElbow) LElbow Yaw LElbowRoll Wrist_.L、Elbow_.L、Shoulder_.L、Spine_Shoulder 右肘(RElbow) RElbow Yaw ,RElbowRoll Wrist_R,Elbow_R,Shoulder_R,Spine_Shoulder 左大腿(LHip) LHipPitch、,LHipRoll Knee_L、Hip_L、Spine_.Base、Spine_Mid 右大腿(RHip) RHipPitch、RHipRoll Knee_R、Hip_R,Spine_Base、Spine_.Mid 左膝(LKnee) LKneePitch Ankle_.L、Knee_L、,Hip_L 右膝(RKnee) RKneePitch Ankle_R,Knee_R,Hip_R 2.3关节示教信息的获取 P2P1=P1-P2=(x1-x2,y1-y2,1-22) 利用Kinect获取骨骼点三维坐标信息,生成关节 P2P3=P3-P2=(x3-x2y3-y23-2) 向量,通过计算关节向量的夹角得到各关节控制角, P3P4=P4-P3=(x4-x3y4-y3,之4-23) 以右肘翻滚角RElbowRoll和偏航角RElbowYaw(图4 (1) 中方框部分)为例,对关节角的计算过程进行说明。 则关节角RElbowRoll为 由表1知,为求RElbowRoll和RElbowYaw的关节角 0REIbowRoll =p2 P1,P2 P3 > 需要Kinect提取的骨骼点有Wrist_R、Elbow_R、Shoul-. (2) derR,Spine_Shoulder,.如图2所示,分别用p1P2P3、 P2P1·P2P3 arccos P2 PIP2 P3 P4表示,设其三维坐标信息分别为(x少1,)、(x2: 记向量P3.4P2.3=P3P4×P2P3,则关节角RElbow- y222)、(3,y3,3)、(x4,y4,24)则有向量: Yaw为2.1 示教者骨骼点信息采集 Kinect for windows v2 是微软专为开发者发布的 一款 3D 体感摄影机,包含 RGB 彩色摄像机及由红 外线发射器和红外线 CMOS 摄像机所构成的 3D 深 度传感器,利用彩色摄像头采集到的彩色图像与红 外摄像头采集到的深度图像,导入即时动态捕捉、影 像辨识功能,能够提取 25 个关节点,从而得到人体 的骨架信息, S = [ s1 , s2 ,…, si,…, s25 ] ,其中 si = (xi,yi,zi) ,如图 2,Kinect 的空间坐标系如图 3。 图 3 Kinect 的空间坐标系 Fig.3 The space coordinate system of Kinect 2.2 Nao 机器人关节自由度与骨骼点的映射关系 推导 仿人机器人 Nao 是 Aldebaran Robotics 公司开 发机器人平台,具有 25 个自由度,共 13 个关节,右 上肢的自由度如图 4 所示。 由于 Kinect 采集的骨骼 信息中均认定所有关节为质点,故末端关节的转动 信息无法从 Kinect 提取的骨架信息中计算得到,因 此忽略各关节的转动信息,推导出各关节对应的自 由度及所需的 Kinect 骨骼点如表 1 所示。 图 4 Nao 机器人右上肢自由度 Fig.4 The DOF of right upper limb of Nao robot 表 1 各关节对应的自由度及所需的 Kinect 骨骼点信息 Table 1 The DOFs corresponding to each joint and the skeleton point of information needed to be accessed 关节 自由度 Kinect 骨骼点 头部(Head) HeadPitch Head、Neck、Spine_Shoulder 手部(Hand) LHand、RHand None 左肩(LShoulder) LShoulderPitch、LShoulderRoll Elbow_L、Shoulder_L、Spine_Shoulder、Spine_Mid 右肩(RShoulder) RShoulderPitch、RShoulderRoll Elbow_R、Shoulder_R、Spine_Shoulder、Spine_Mid 左肘(LElbow) LElbowYaw、LElbowRoll Wrist_L、Elbow_L、Shoulder_L、Spine_Shoulder 右肘(RElbow) RElbowYaw、RElbowRoll Wrist_R、Elbow_R、Shoulder_R、Spine_Shoulder 左大腿(LHip) LHipPitch、LHipRoll Knee_L、Hip_L、Spine_Base、Spine_Mid 右大腿(RHip) RHipPitch、RHipRoll Knee_R、Hip_R、Spine_Base、Spine_Mid 左膝(LKnee) LKneePitch Ankle_L、Knee_L、Hip_L 右膝(RKnee) RKneePitch Ankle_R、Knee_R、Hip_R 2.3 关节示教信息的获取 利用 Kinect 获取骨骼点三维坐标信息,生成关节 向量,通过计算关节向量的夹角得到各关节控制角, 以右肘翻滚角 RElbowRoll 和偏航角 RElbowYaw(图 4 中方框部分)为例,对关节角的计算过程进行说明。 由表 1 知,为求 RElbowRoll 和 RElbowYaw 的关节角 需要 Kinect 提取的骨骼点有 Wrist_R、Elbow_R、Shoul⁃ der_R,Spine_Shoulder,如图 2 所示,分别用 p1 、p2 、p3 、 p4 表示,设其三维坐标信息分别为 (x1 ,y1 ,z1 )、(x2 , y2 ,z2 )、(x3 ,y3 ,z3 )、(x4 ,y4 ,z4 ) 则有向量: p2 p1 = p1 - p2 = (x1 - x2 ,y1 - y2 ,z1 - z2 ) p2 p3 = p3 - p2 = (x3 - x2 ,y3 - y2 ,z3 - z2 ) p3 p4 = p4 - p3 = (x4 - x3 ,y4 - y3 ,z4 - z3 ) ì î í ï ï ï ï (1) 则关节角 RElbowRoll 为 θRElbowRoll = < p2 p1 ,p2 p3 > = arccos p2 p1·p2 p3 p2 p1 p2 p3 æ è ç ö ø ÷ ((2) 记向量 p3,4 p2,3 = p3 p4 × p2 p3 ,则关节角 RElbow⁃ Yaw 为 ·182· 智 能 系 统 学 报 第 11 卷