正在加载图片...
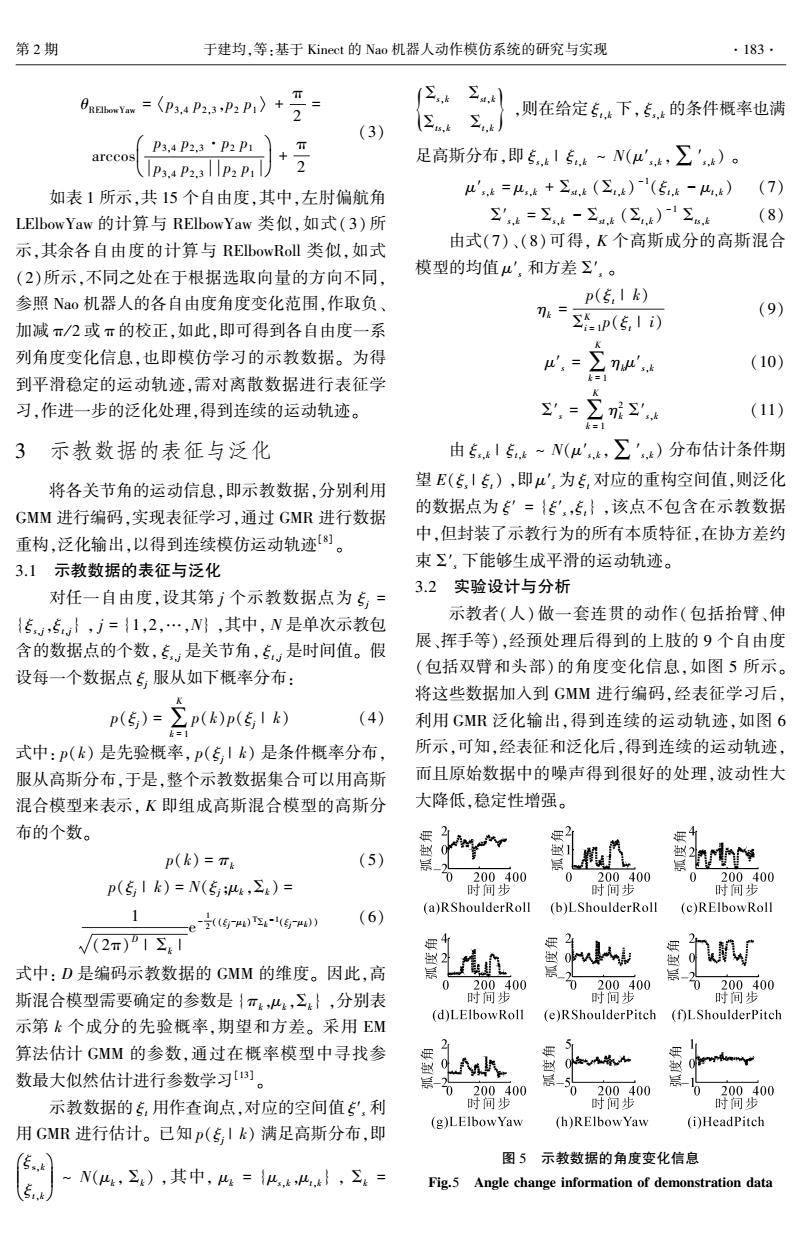
第2期 于建均,等:基于Kinect的Nao机器人动作模仿系统的研究与实现 ·183· Aann=(p4P2.aP2P,)+T 则在给定专下,专4的条件概率也满 3) arccos P3,4P23·P2p1】 IPs4 P2.3Pa P:D 2 足高斯分布,即专l专k~N(u,∑')。 如表1所示,共15个自由度,其中,左肘偏航角 u'k=45+Σk(Σ)(5k-44)(7) LElbowYaw的计算与RElbow Yaw类似,如式(3)所 Σk=k-Σak()1Σ (8) 示,其余各自由度的计算与RElbowRoll类似,如式 由式(7)、(8)可得,K个高斯成分的高斯混合 (2)所示,不同之处在于根据选取向量的方向不同, 模型的均值以',和方差,。 参照Nao机器人的各自由度角度变化范围,作取负、 p(5I k) 7k= 加减π/2或T的校正,如此,即可得到各自由度一系 p(,1i) (9) 列角度变化信息,也即模仿学习的示教数据。为得 比,=∑n (10) 到平滑稳定的运动轨迹,需对离散数据进行表征学 k=1 习,作进一步的泛化处理,得到连续的运动轨迹。 =呢 (11) 3示教数据的表征与泛化 由专klk~N(uk,∑')分布估计条件期 将各关节角的运动信息,即示教数据,分别利用 望E(1专,),即u',为,对应的重构空间值,则泛化 GMM进行编码,实现表征学习,通过GMR进行数据 的数据点为'={',},该点不包含在示教数据 重构,泛化输出,以得到连续模仿运动轨迹)。 中,但封装了示教行为的所有本质特征,在协方差约 3.1示教数据的表征与泛化 束Σ',下能够生成平滑的运动轨迹。 3.2实验设计与分析 对任一自由度,设其第j个示教数据点为专= {55},j={1,2,…,N},其中,N是单次示教包 示教者(人)做一套连贯的动作(包括拾臂、伸 含的数据点的个数,专,是关节角,专,是时间值。假 展、挥手等),经预处理后得到的上肢的9个自由度 设每一个数据点专服从如下概率分布: (包括双臂和头部)的角度变化信息,如图5所示。 将这些数据加入到GMM进行编码,经表征学习后, p()=】 np专I) (4) 利用GMR泛化输出,得到连续的运动轨迹,如图6 式中:p(k)是先验概率,P(1k)是条件概率分布, 所示,可知,经表征和泛化后,得到连续的运动轨迹, 服从高斯分布,于是,整个示教数据集合可以用高斯 而且原始数据中的噪声得到很好的处理,波动性大 混合模型来表示,K即组成高斯混合模型的高斯分 大降低,稳定性增强。 布的个数。 p(k)=Tk 5 r 0 200400 200400 p(专Ik)=N(专;4,Σ:)= 时间步 时间步 00朵00 时间步 1 (a)RShoulderRoll (b)LShoulderRoll (c)REIbowRoll e()r-写7w) (6) √/(2m)1ΣI 式中:D是编码示教数据的GMM的维度。因此,高 200400 0 200400 0 200400 斯混合模型需要确定的参数是{π,山4,Σ},分别表 时间步 时间步 时间步 (d)LElbowRoll (e)RShoulderPitch (f)LShoulderPitch 示第k个成分的先验概率,期望和方差。采用EM 算法估计GMM的参数,通过在概率模型中寻找参 5 旺 数最大似然估计进行参数学习)。 香 0200400 0200400 200400 示教数据的:用作查询点,对应的空间值”,利 时间步 时间步 时间步 (g)LElbowYaw (h)RElbow Yaw (i)HeadPitch 用GMR进行估计。已知p(专,Ik)满足高斯分布,即 图5示教数据的角度变化信息 N(u4,),其中,h4={44},= E:.8 Fig.5 Angle change information of demonstration dataθRElbowYaw = 〈p3,4 p2,3 ,p2 p1 〉 + π 2 = arccos p3,4 p2,3·p2 p1 p3,4 p2,3 p2 p1 æ è ç ö ø ÷ + π 2 (3) 如表 1 所示,共 15 个自由度,其中,左肘偏航角 LElbowYaw 的计算与 RElbowYaw 类似,如式(3) 所 示,其余各自由度的计算与 RElbowRoll 类似,如式 (2)所示,不同之处在于根据选取向量的方向不同, 参照 Nao 机器人的各自由度角度变化范围,作取负、 加减 π/ 2 或 π 的校正,如此,即可得到各自由度一系 列角度变化信息,也即模仿学习的示教数据。 为得 到平滑稳定的运动轨迹,需对离散数据进行表征学 习,作进一步的泛化处理,得到连续的运动轨迹。 3 示教数据的表征与泛化 将各关节角的运动信息,即示教数据,分别利用 GMM 进行编码,实现表征学习,通过 GMR 进行数据 重构,泛化输出,以得到连续模仿运动轨迹[8] 。 3.1 示教数据的表征与泛化 对任一自由度,设其第 j 个示教数据点为 ξj = {ξs,j,ξt,j} , j = {1,2,…,N} ,其中, N 是单次示教包 含的数据点的个数, ξs,j 是关节角, ξt,j 是时间值。 假 设每一个数据点 ξj 服从如下概率分布: p(ξj) = ∑ K k = 1 p(k)p(ξj | k) (4) 式中: p(k) 是先验概率, p(ξj | k) 是条件概率分布, 服从高斯分布,于是,整个示教数据集合可以用高斯 混合模型来表示, K 即组成高斯混合模型的高斯分 布的个数。 p(k) = πk (5) p(ξj | k) = N(ξj;μk,Σk) = 1 (2π) D | Σk | e - 1 2 ((ξj -μk ) TΣk -1(ξj -μk )) (6) 式中: D 是编码示教数据的 GMM 的维度。 因此,高 斯混合模型需要确定的参数是 {πk,μk,Σk} ,分别表 示第 k 个成分的先验概率,期望和方差。 采用 EM 算法估计 GMM 的参数,通过在概率模型中寻找参 数最大似然估计进行参数学习[13] 。 示教数据的 ξt 用作查询点,对应的空间值 ξ′s 利 用 GMR 进行估计。 已知 p(ξj | k) 满足高斯分布,即 ξs,k ξt,k æ è çç ö ø ÷÷ ~ N(μk, Σk) ,其中, μk = {μs,k,μt,k} , Σk = Σs,k Σst,k Σts,k Σt,k { } ,则在给定 ξt,k 下, ξs,k 的条件概率也满 足高斯分布,即 ξs,k | ξt,k ~ N(μ′s,k,∑′s,k) 。 μ′s,k = μs,k + Σst,k (Σt,k) -1 (ξt,k - μt,k) (7) Σ′s,k = Σs,k - Σst,k (Σt,k) -1 Σts,k (8) 由式(7)、(8)可得, K 个高斯成分的高斯混合 模型的均值 μ′s 和方差 Σ′s 。 ηk = p(ξt | k) Σ K i = 1 p(ξt | i) (9) μ′s = ∑ K k = 1 ηkμ′s,k (10) Σ′s = ∑ K k = 1 η 2 k Σ′s,k (11) 由 ξs,k | ξt,k ~ N(μ′s,k,∑′s,k) 分布估计条件期 望 E(ξs | ξt) ,即 μ′s 为 ξt 对应的重构空间值,则泛化 的数据点为 ξ′ = {ξ′s,ξt} ,该点不包含在示教数据 中,但封装了示教行为的所有本质特征,在协方差约 束 Σ′s 下能够生成平滑的运动轨迹。 3.2 实验设计与分析 示教者(人) 做一套连贯的动作(包括抬臂、伸 展、挥手等),经预处理后得到的上肢的 9 个自由度 (包括双臂和头部) 的角度变化信息,如图 5 所示。 将这些数据加入到 GMM 进行编码,经表征学习后, 利用 GMR 泛化输出,得到连续的运动轨迹,如图 6 所示,可知,经表征和泛化后,得到连续的运动轨迹, 而且原始数据中的噪声得到很好的处理,波动性大 大降低,稳定性增强。 图 5 示教数据的角度变化信息 Fig.5 Angle change information of demonstration data 第 2 期 于建均,等:基于 Kinect 的 Nao 机器人动作模仿系统的研究与实现 ·183·