正在加载图片...
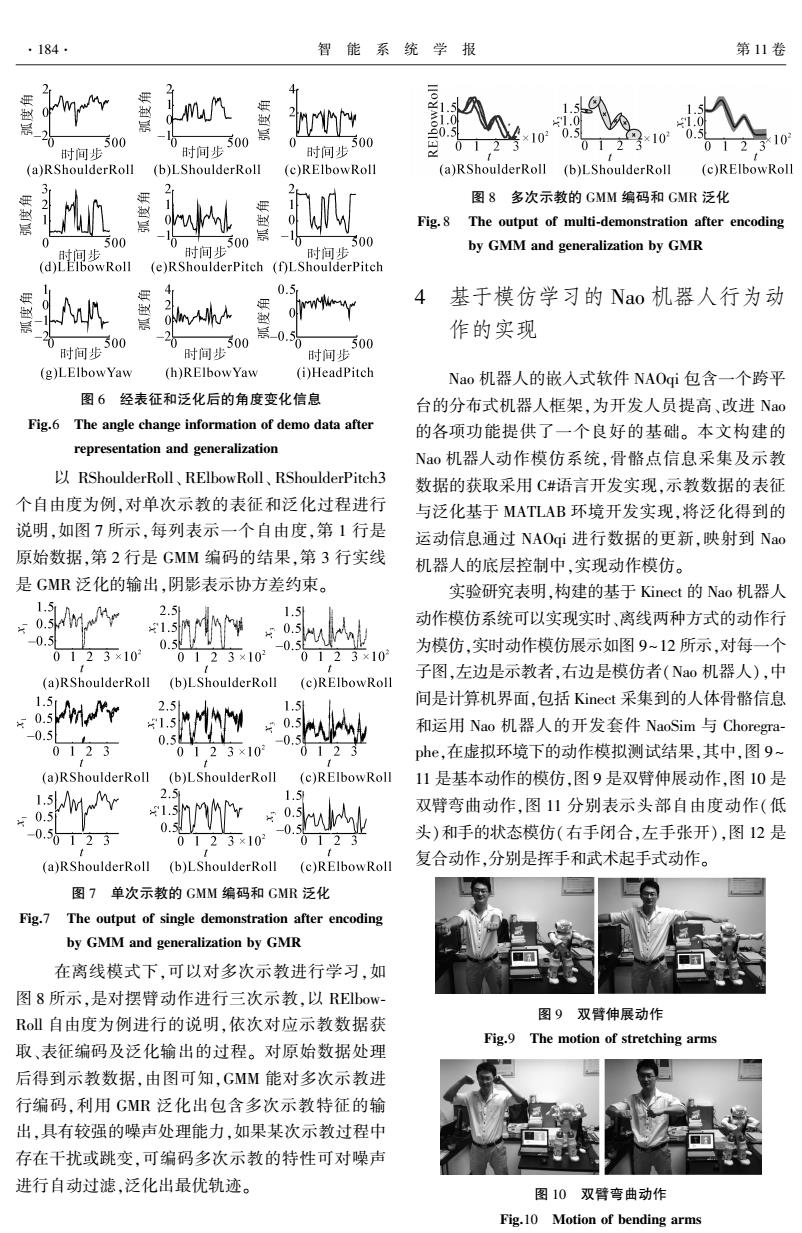
·184 智能系统学报 第11卷 4 1.头C 1.0 1.0 00 500 ×1020.5 x10 0.5 时间步 时间步 时间步300 0123 0123 0123 (a)RShoulderRoll (b)LShoulderRoll (c)RElbowRoll (a)RShoulderRoll (b)LShoulderRoll (c)REIbowRoll 图8多次示教的GMM编码和GMR泛化 Fig.8 The output of multi-demonstration after encoding 500 500 300 by GMM and generalization by GMR 时闯步 时间步 时间步 (d)LElbowRoll (e)RShoulderPitch (f)LShoulderPitch 0.5 ty 4 基于模仿学习的Nao机器人行为动 0 作的实现 500 500 三0.5 500 时间步 时间步 0 时间步 (g)LElbowYaw (h)REIbowYaw (i)HeadPitch Nao机器人的嵌入式软件NAOqi包含一个跨平 图6经表征和泛化后的角度变化信息 台的分布式机器人框架,为开发人员提高、改进Nao Fig.6 The angle change information of demo data after 的各项功能提供了一个良好的基础。本文构建的 representation and generalization Nao机器人动作模仿系统,骨骼点信息采集及示教 以RShoulderRoll、RElbow Roll、RShoulderPitch3 数据的获取采用C#语言开发实现,示教数据的表征 个自由度为例,对单次示教的表征和泛化过程进行 与泛化基于MATLAB环境开发实现,将泛化得到的 说明,如图7所示,每列表示一个自由度,第1行是 运动信息通过NAOqi进行数据的更新,映射到Nao 原始数据,第2行是GMM编码的结果,第3行实线 机器人的底层控制中,实现动作模仿。 是GMR泛化的输出,阴影表示协方差约束。 实验研究表明,构建的基于Kinect的Nao机器人 2.51 1.5 动作模仿系统可以实现实时、离线两种方式的动作行 -0.5 0.5 0123x10200123×102 为模仿,实时动作模仿展示如图9~12所示,对每一个 0123×10 (a)RShoulderRoll (b)LShoulderRoll (c)RElbowRoll 子图,左边是示教者,右边是模仿者(Nao机器人),中 8MpY 2.5 1.5 间是计算机界面,包括Kinect采集到的人体骨骼信息 _0.5 和运用Nao机器人的开发套件NaoSim与Choregra- 023 0.5 -0.5 0123×10 0123 phe,在虚拟环境下的动作模拟测试结果,其中,图9~ (a)RShoulderRoll (b)LShoulderRoll (c)RElbowRoll 11是基本动作的模仿,图9是双臂伸展动作,图10是 1. 2.5 1.5 0.5j 双臂弯曲动作,图11分别表示头部自由度动作(低 -0.50T23 0.5V 0123×1020123 头)和手的状态模仿(右手闭合,左手张开),图12是 (a)RShoulderRoll (b)LShoulderRoll (c)RElbowRoll 复合动作,分别是挥手和武术起手式动作。 图7单次示教的GMM编码和GMR泛化 Fig.7 The output of single demonstration after encoding by GMM and generalization by GMR 在离线模式下,可以对多次示教进行学习,如 图8所示,是对摆臂动作进行三次示教,以RElbow. 图9双臂伸展动作 R自由度为例进行的说明,依次对应示教数据获 Fig.9 The motion of stretching arms 取、表征编码及泛化输出的过程。对原始数据处理 后得到示教数据,由图可知,GMM能对多次示教进 行编码,利用GMR泛化出包含多次示教特征的输 出,具有较强的噪声处理能力,如果某次示教过程中 存在干扰或跳变,可编码多次示教的特性可对噪声 进行自动过滤,泛化出最优轨迹。 图10双臂弯曲动作 Fig.10 Motion of bending arms图 6 经表征和泛化后的角度变化信息 Fig.6 The angle change information of demo data after representation and generalization 以 RShoulderRoll、 RElbowRoll、 RShoulderPitch3 个自由度为例,对单次示教的表征和泛化过程进行 说明,如图 7 所示,每列表示一个自由度,第 1 行是 原始数据,第 2 行是 GMM 编码的结果,第 3 行实线 是 GMR 泛化的输出,阴影表示协方差约束。 图 7 单次示教的 GMM 编码和 GMR 泛化 Fig.7 The output of single demonstration after encoding by GMM and generalization by GMR 在离线模式下,可以对多次示教进行学习,如 图 8 所示,是对摆臂动作进行三次示教,以 RElbow⁃ Roll 自由度为例进行的说明,依次对应示教数据获 取、表征编码及泛化输出的过程。 对原始数据处理 后得到示教数据,由图可知,GMM 能对多次示教进 行编码,利用 GMR 泛化出包含多次示教特征的输 出,具有较强的噪声处理能力,如果某次示教过程中 存在干扰或跳变,可编码多次示教的特性可对噪声 进行自动过滤,泛化出最优轨迹。 图 8 多次示教的 GMM 编码和 GMR 泛化 Fig. 8 The output of multi⁃demonstration after encoding by GMM and generalization by GMR 4 基于模仿学习的 Nao 机器人行为动 作的实现 Nao 机器人的嵌入式软件 NAOqi 包含一个跨平 台的分布式机器人框架,为开发人员提高、改进 Nao 的各项功能提供了一个良好的基础。 本文构建的 Nao 机器人动作模仿系统,骨骼点信息采集及示教 数据的获取采用 C#语言开发实现,示教数据的表征 与泛化基于 MATLAB 环境开发实现,将泛化得到的 运动信息通过 NAOqi 进行数据的更新,映射到 Nao 机器人的底层控制中,实现动作模仿。 实验研究表明,构建的基于 Kinect 的 Nao 机器人 动作模仿系统可以实现实时、离线两种方式的动作行 为模仿,实时动作模仿展示如图 9~12 所示,对每一个 子图,左边是示教者,右边是模仿者(Nao 机器人),中 间是计算机界面,包括 Kinect 采集到的人体骨骼信息 和运用 Nao 机器人的开发套件 NaoSim 与 Choregra⁃ phe,在虚拟环境下的动作模拟测试结果,其中,图 9~ 11 是基本动作的模仿,图 9 是双臂伸展动作,图 10 是 双臂弯曲动作,图 11 分别表示头部自由度动作(低 头)和手的状态模仿(右手闭合,左手张开),图 12 是 复合动作,分别是挥手和武术起手式动作。 图 9 双臂伸展动作 Fig.9 The motion of stretching arms 图 10 双臂弯曲动作 Fig.10 Motion of bending arms ·184· 智 能 系 统 学 报 第 11 卷