正在加载图片...
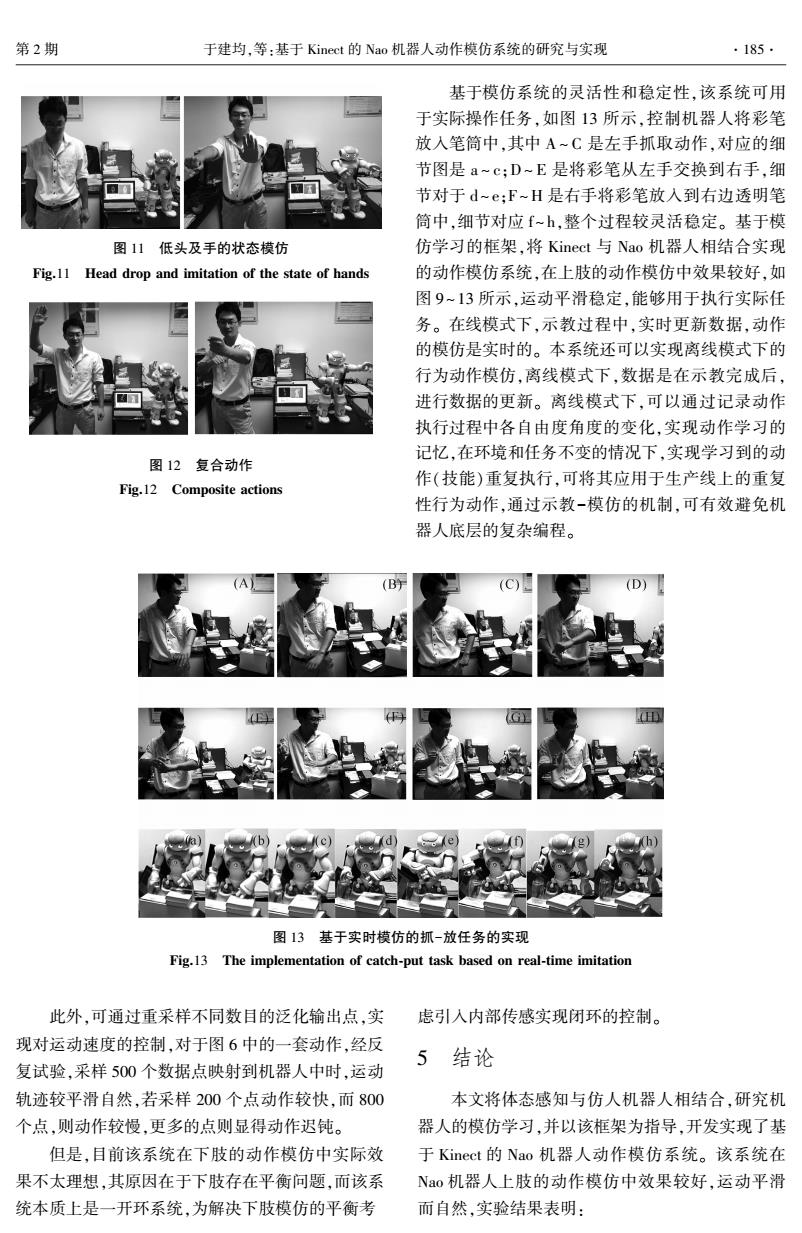
第2期 于建均,等:基于Kinect的Nao机器人动作模仿系统的研究与实现 ·185. 基于模仿系统的灵活性和稳定性,该系统可用 于实际操作任务,如图13所示,控制机器人将彩笔 放入笔筒中,其中A~C是左手抓取动作,对应的细 节图是a~c:D~E是将彩笔从左手交换到右手,细 节对于d~e:F~H是右手将彩笔放入到右边透明笔 筒中,细节对应f~h,整个过程较灵活稳定。基于模 图11低头及手的状态模仿 仿学习的框架,将Kinect与Nao机器人相结合实现 Fig.11 Head drop and imitation of the state of hands 的动作模仿系统,在上肢的动作模仿中效果较好,如 图9~13所示,运动平滑稳定,能够用于执行实际任 务。在线模式下,示教过程中,实时更新数据,动作 的模仿是实时的。本系统还可以实现离线模式下的 行为动作模仿,离线模式下,数据是在示教完成后, 进行数据的更新。离线模式下,可以通过记录动作 执行过程中各自由度角度的变化,实现动作学习的 记忆,在环境和任务不变的情况下,实现学习到的动 图12复合动作 作(技能)重复执行,可将其应用于生产线上的重复 Fig.12 Composite actions 性行为动作,通过示教-模仿的机制,可有效避免机 器人底层的复杂编程。 B (C) (D) (HD 图13基于实时模仿的抓-放任务的实现 Fig.13 The implementation of catch-put task based on real-time imitation 此外,可通过重采样不同数目的泛化输出点,实 虑引入内部传感实现闭环的控制。 现对运动速度的控制,对于图6中的一套动作,经反 5结论 复试验,采样500个数据,点映射到机器人中时,运动 轨迹较平滑自然,若采样200个点动作较快,而800 本文将体态感知与仿人机器人相结合,研究机 个点,则动作较慢,更多的点则显得动作迟钝。 器人的模仿学习,并以该框架为指导,开发实现了基 但是,目前该系统在下肢的动作模仿中实际效 于Kinect的Nao机器人动作模仿系统。该系统在 果不太理想,其原因在于下肢存在平衡问题,而该系 Nao机器人上肢的动作模仿中效果较好,运动平滑 统本质上是一开环系统,为解决下肢模仿的平衡考 而自然,实验结果表明:图 11 低头及手的状态模仿 Fig.11 Head drop and imitation of the state of hands 图 12 复合动作 Fig.12 Composite actions 基于模仿系统的灵活性和稳定性,该系统可用 于实际操作任务,如图 13 所示,控制机器人将彩笔 放入笔筒中,其中 A ~ C 是左手抓取动作,对应的细 节图是 a ~ c;D ~ E 是将彩笔从左手交换到右手,细 节对于 d~ e;F~ H 是右手将彩笔放入到右边透明笔 筒中,细节对应 f~ h,整个过程较灵活稳定。 基于模 仿学习的框架,将 Kinect 与 Nao 机器人相结合实现 的动作模仿系统,在上肢的动作模仿中效果较好,如 图 9~13 所示,运动平滑稳定,能够用于执行实际任 务。 在线模式下,示教过程中,实时更新数据,动作 的模仿是实时的。 本系统还可以实现离线模式下的 行为动作模仿,离线模式下,数据是在示教完成后, 进行数据的更新。 离线模式下,可以通过记录动作 执行过程中各自由度角度的变化,实现动作学习的 记忆,在环境和任务不变的情况下,实现学习到的动 作(技能)重复执行,可将其应用于生产线上的重复 性行为动作,通过示教-模仿的机制,可有效避免机 器人底层的复杂编程。 图 13 基于实时模仿的抓-放任务的实现 Fig.13 The implementation of catch⁃put task based on real⁃time imitation 此外,可通过重采样不同数目的泛化输出点,实 现对运动速度的控制,对于图 6 中的一套动作,经反 复试验,采样 500 个数据点映射到机器人中时,运动 轨迹较平滑自然,若采样 200 个点动作较快,而 800 个点,则动作较慢,更多的点则显得动作迟钝。 但是,目前该系统在下肢的动作模仿中实际效 果不太理想,其原因在于下肢存在平衡问题,而该系 统本质上是一开环系统,为解决下肢模仿的平衡考 虑引入内部传感实现闭环的控制。 5 结论 本文将体态感知与仿人机器人相结合,研究机 器人的模仿学习,并以该框架为指导,开发实现了基 于 Kinect 的 Nao 机器人动作模仿系统。 该系统在 Nao 机器人上肢的动作模仿中效果较好,运动平滑 而自然,实验结果表明: 第 2 期 于建均,等:基于 Kinect 的 Nao 机器人动作模仿系统的研究与实现 ·185·