正在加载图片...
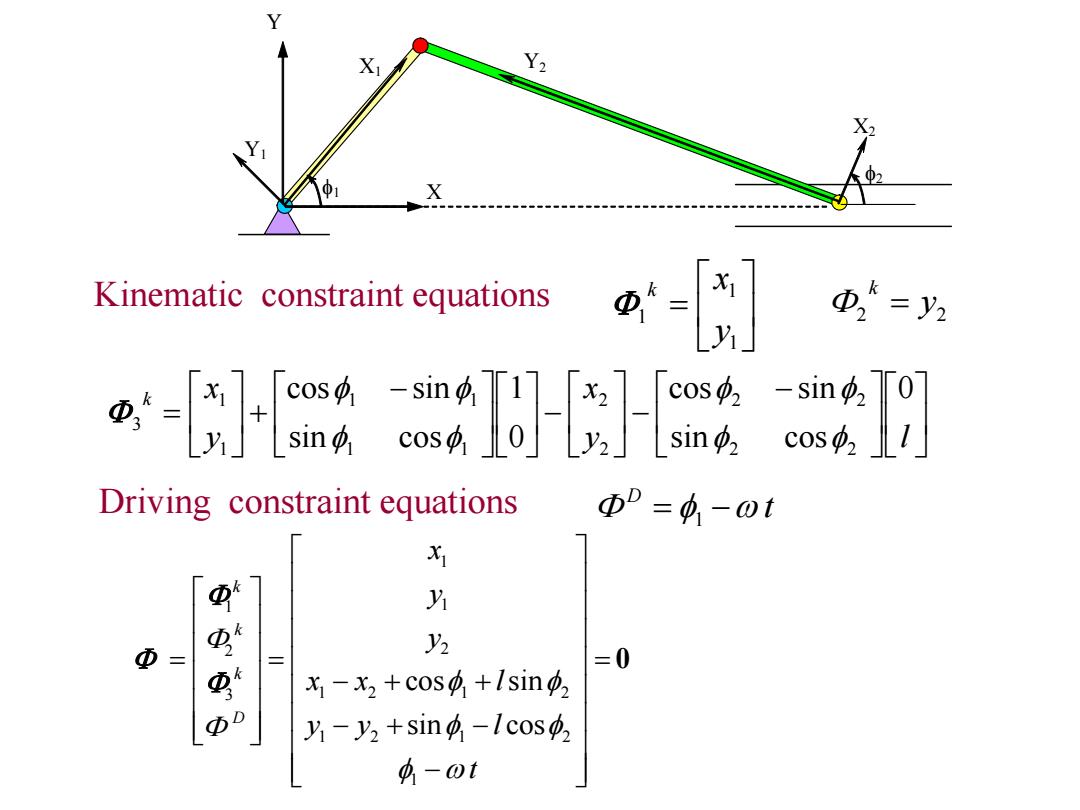
Y Y2 Kinematic constraint equations ,=2 cos2 Driving constraint equations Φ”=功-0t y Φ= y2 =0 -x2+cos +lsin y-y2+sin4-Icos中, 4-0t1 X1 Y1 X2 Y2 2 X Y Kinematic constraint equations 1 1 1 y k x y l x y x k 0 sin cos cos sin 0 1 sin cos cos sin 2 2 2 2 2 2 1 1 1 1 1 1 3 2 2 y k t D 1 1 1 1 2 2 3 1 2 1 2 1 2 1 2 1 cos sin sin cos k k k D x y y x x l y y l t 0 Driving constraint equations