正在加载图片...
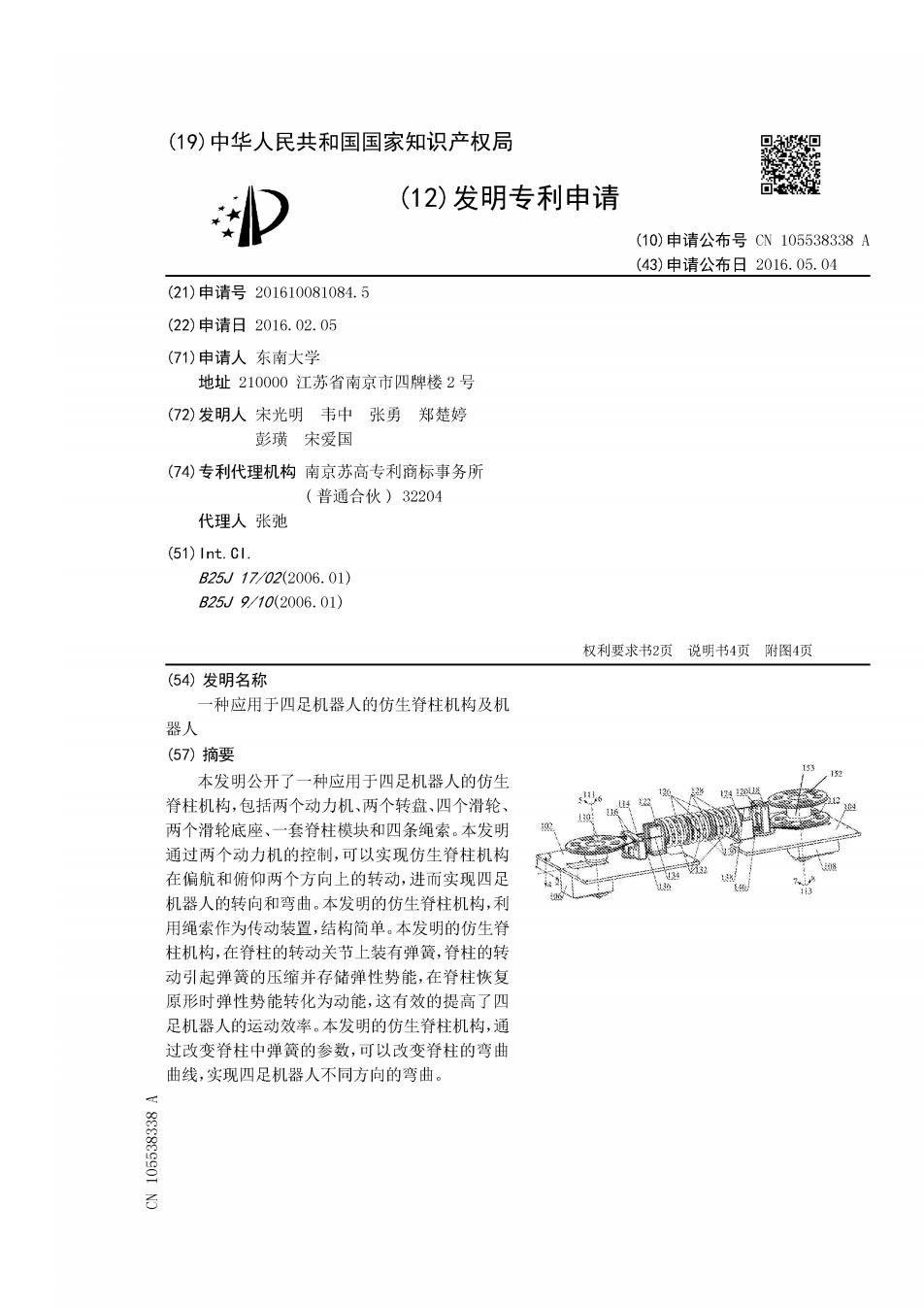
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利申请 (10)申请公布号CN105538338A (43)申请公布日2016.05.04 (21)申请号201610081084.5 (22)申请日2016.02.05 (71)申请人东南大学 地址210000江苏省南京市四牌楼2号 (72)发明人宋光明韦中张勇郑楚婷 彭璜宋爱国 (74)专利代理机构南京苏高专利商标事务所 (普通合伙)32204 代理人张弛 (51)nt.Cl. B25J17/02(2006.01) B25J9/10(2006.01) 权利要求书2页说明书4页附图4页 (54)发明名称 种应用于四足机器人的仿生脊柱机构及机 器人 (57)摘要 本发明公开了一种应用于四足机器人的仿生 s16 12 20送 脊柱机构,包括两个动力机、两个转盘、四个滑轮、 两个滑轮底座、一套脊柱模块和四条绳索。本发明 通过两个动力机的控制,可以实现仿生脊柱机构 在偏航和俯仰两个方向上的转动,进而实现四足 2 机器人的转向和弯曲。本发明的仿生脊柱机构,利 用绳索作为传动装置,结构简单。本发明的仿生脊 柱机构,在脊柱的转动关节上装有弹簧,脊柱的转 动引起弹簧的压缩并存储弹性势能,在脊柱恢复 原形时弹性势能转化为动能,这有效的提高了四 足机器人的运动效率。本发明的仿生脊柱机构,通 过改变脊柱中弹簧的参数,可以改变脊柱的弯曲 曲线,实现四足机器人不同方向的弯曲。 石