正在加载图片...
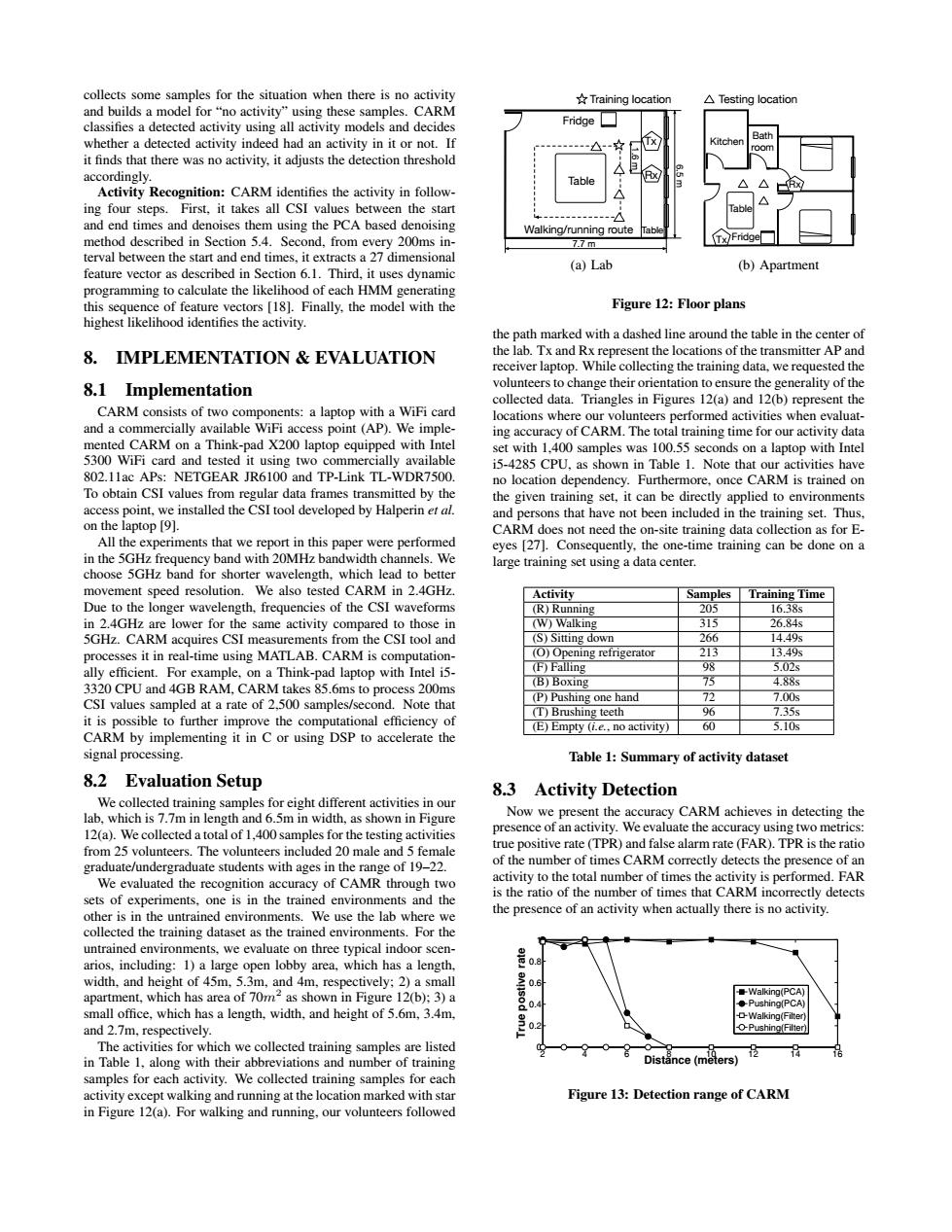
collects some samples for the situation when there is no activity ☆Training location △Testing location and builds a model for"no activity"using these samples.CARM classifies a detected activity using all activity models and decides Fridge whether a detected activity indeed had an activity in it or not.If it finds that there was no activity.it adjusts the detection threshold accordingly Table Activity Recognition:CARM identifies the activity in follow- ing four steps.First,it takes all CSI values between the start and end times and denoises them using the PCA based denoising Walking/running route method described in Section 5.4.Second.from every 200ms in- 77m Tx/Fridge terval between the start and end times,it extracts a 27 dimensional (a)Lab feature vector as described in Section 6.1.Third,it uses dynamic (b)Apartment programming to calculate the likelihood of each HMM generating this sequence of feature vectors [18].Finally,the model with the Figure 12:Floor plans highest likelihood identifies the activity. the path marked with a dashed line around the table in the center of 6 IMPLEMENTATION EVALUATION the lab.Tx and Rx represent the locations of the transmitter AP and receiver laptop.While collecting the training data,we requested the 8.1 Implementation volunteers to change their orientation to ensure the generality of the collected data.Triangles in Figures 12(a)and 12(b)represent the CARM consists of two components:a laptop with a WiFi card locations where our volunteers performed activities when evaluat- and a commercially available WiFi access point(AP).We imple- ing accuracy of CARM.The total training time for our activity data mented CARM on a Think-pad X200 laptop equipped with Intel set with 1,400 samples was 100.55 seconds on a laptop with Intel 5300 WiFi card and tested it using two commercially available i5-4285 CPU.as shown in Table 1.Note that our activities have 802.11ac APs:NETGEAR JR6100 and TP-Link TL-WDR7500. no location dependency.Furthermore,once CARM is trained on To obtain CSI values from regular data frames transmitted by the the given training set,it can be directly applied to environments access point,we installed the CSI tool developed by Halperin et al. and persons that have not been included in the training set.Thus, on the laptop [9]. CARM does not need the on-site training data collection as for E- All the experiments that we report in this paper were performed eyes [27].Consequently,the one-time training can be done on a in the 5GHz frequency band with 20MHz bandwidth channels.We large training set using a data center choose 5GHz band for shorter wavelength,which lead to better movement speed resolution.We also tested CARM in 2.4GHz. Activity Samples Training Time Due to the longer wavelength,frequencies of the CSI waveforms (R)Running 205 16.383 in 2.4GHz are lower for the same activity compared to those in (W)Walking 315 26.84s 5GHz.CARM acquires CSI measurements from the CSI tool and (S)Sitting down 266 14.49s processes it in real-time using MATLAB.CARM is computation- (O)Opening refrigerator 213 13.49s ally efficient.For example,on a Think-pad laptop with Intel i5- (F)Falling 98 5.02s 3320 CPU and 4GB RAM,CARM takes 85.6ms to process 200ms (B)Boxing 75 4.883 (P)Pushing one hand 72 7.00s CSI values sampled at a rate of 2,500 samples/second.Note that (T)Brushing teeth 96 7.35s it is possible to further improve the computational efficiency of (E)Empty (i.e.,no activity) 60 5.10s CARM by implementing it in C or using DSP to accelerate the signal processing. Table 1:Summary of activity dataset 8.2 Evaluation Setup 8.3 Activity Detection We collected training samples for eight different activities in our lab.which is 7.7m in length and 6.5m in width,as shown in Figure Now we present the accuracy CARM achieves in detecting the 12(a).We collected a total of 1,400 samples for the testing activities presence of an activity.We evaluate the accuracy using two metrics: from 25 volunteers.The volunteers included 20 male and 5 female true positive rate(TPR)and false alarm rate(FAR).TPR is the ratio graduate/undergraduate students with ages in the range of 19-22. of the number of times CARM correctly detects the presence of an We evaluated the recognition accuracy of CAMR through two activity to the total number of times the activity is performed.FAR sets of experiments,one is in the trained environments and the is the ratio of the number of times that CARM incorrectly detects other is in the untrained environments.We use the lab where we the presence of an activity when actually there is no activity. collected the training dataset as the trained environments.For the untrained environments,we evaluate on three typical indoor scen- arios,including:1)a large open lobby area,which has a length, width,and height of 45m,5.3m,and 4m,respectively;2)a small apartment,which has area of 70m-as shown in Figure 12(b);3)a 垂-Walking(PCA) 60 ◆Pushing(PCA) small office,which has a length,width,and height of 5.6m,3.4m, DWalking(Filter and 2.7m,respectively. OPushinolFilter) The activities for which we collected training samples are listed in Table 1.along with their abbreviations and number of training Distance(meters) samples for each activity.We collected training samples for each activity except walking and running at the location marked with star Figure 13:Detection range of CARM in Figure 12(a).For walking and running,our volunteers followedcollects some samples for the situation when there is no activity and builds a model for “no activity” using these samples. CARM classifies a detected activity using all activity models and decides whether a detected activity indeed had an activity in it or not. If it finds that there was no activity, it adjusts the detection threshold accordingly. Activity Recognition: CARM identifies the activity in following four steps. First, it takes all CSI values between the start and end times and denoises them using the PCA based denoising method described in Section 5.4. Second, from every 200ms interval between the start and end times, it extracts a 27 dimensional feature vector as described in Section 6.1. Third, it uses dynamic programming to calculate the likelihood of each HMM generating this sequence of feature vectors [18]. Finally, the model with the highest likelihood identifies the activity. 8. IMPLEMENTATION & EVALUATION 8.1 Implementation CARM consists of two components: a laptop with a WiFi card and a commercially available WiFi access point (AP). We implemented CARM on a Think-pad X200 laptop equipped with Intel 5300 WiFi card and tested it using two commercially available 802.11ac APs: NETGEAR JR6100 and TP-Link TL-WDR7500. To obtain CSI values from regular data frames transmitted by the access point, we installed the CSI tool developed by Halperin et al. on the laptop [9]. All the experiments that we report in this paper were performed in the 5GHz frequency band with 20MHz bandwidth channels. We choose 5GHz band for shorter wavelength, which lead to better movement speed resolution. We also tested CARM in 2.4GHz. Due to the longer wavelength, frequencies of the CSI waveforms in 2.4GHz are lower for the same activity compared to those in 5GHz. CARM acquires CSI measurements from the CSI tool and processes it in real-time using MATLAB. CARM is computationally efficient. For example, on a Think-pad laptop with Intel i5- 3320 CPU and 4GB RAM, CARM takes 85.6ms to process 200ms CSI values sampled at a rate of 2,500 samples/second. Note that it is possible to further improve the computational efficiency of CARM by implementing it in C or using DSP to accelerate the signal processing. 8.2 Evaluation Setup We collected training samples for eight different activities in our lab, which is 7.7m in length and 6.5m in width, as shown in Figure 12(a). We collected a total of 1,400 samples for the testing activities from 25 volunteers. The volunteers included 20 male and 5 female graduate/undergraduate students with ages in the range of 19–22. We evaluated the recognition accuracy of CAMR through two sets of experiments, one is in the trained environments and the other is in the untrained environments. We use the lab where we collected the training dataset as the trained environments. For the untrained environments, we evaluate on three typical indoor scenarios, including: 1) a large open lobby area, which has a length, width, and height of 45m, 5.3m, and 4m, respectively; 2) a small apartment, which has area of 70m2 as shown in Figure 12(b); 3) a small office, which has a length, width, and height of 5.6m, 3.4m, and 2.7m, respectively. The activities for which we collected training samples are listed in Table 1, along with their abbreviations and number of training samples for each activity. We collected training samples for each activity except walking and running at the location marked with star in Figure 12(a). For walking and running, our volunteers followed Table Walking/running route Table 7.7 m 6.5 m 1.6 m Fridge Training location Tx Rx (a) Lab Table Fridge Kitchen Tx Bath room Rx Testing location (b) Apartment Figure 12: Floor plans the path marked with a dashed line around the table in the center of the lab. Tx and Rx represent the locations of the transmitter AP and receiver laptop. While collecting the training data, we requested the volunteers to change their orientation to ensure the generality of the collected data. Triangles in Figures 12(a) and 12(b) represent the locations where our volunteers performed activities when evaluating accuracy of CARM. The total training time for our activity data set with 1,400 samples was 100.55 seconds on a laptop with Intel i5-4285 CPU, as shown in Table 1. Note that our activities have no location dependency. Furthermore, once CARM is trained on the given training set, it can be directly applied to environments and persons that have not been included in the training set. Thus, CARM does not need the on-site training data collection as for Eeyes [27]. Consequently, the one-time training can be done on a large training set using a data center. Activity Samples Training Time (R) Running 205 16.38s (W) Walking 315 26.84s (S) Sitting down 266 14.49s (O) Opening refrigerator 213 13.49s (F) Falling 98 5.02s (B) Boxing 75 4.88s (P) Pushing one hand 72 7.00s (T) Brushing teeth 96 7.35s (E) Empty (i.e., no activity) 60 5.10s Table 1: Summary of activity dataset 8.3 Activity Detection Now we present the accuracy CARM achieves in detecting the presence of an activity. We evaluate the accuracy using two metrics: true positive rate (TPR) and false alarm rate (FAR). TPR is the ratio of the number of times CARM correctly detects the presence of an activity to the total number of times the activity is performed. FAR is the ratio of the number of times that CARM incorrectly detects the presence of an activity when actually there is no activity. 2 4 6 8 10 12 14 16 0 0.2 0.4 0.6 0.8 1 Distance (meters) True postive rate Walking(PCA) Pushing(PCA) Walking(Filter) Pushing(Filter) Figure 13: Detection range of CARM