正在加载图片...
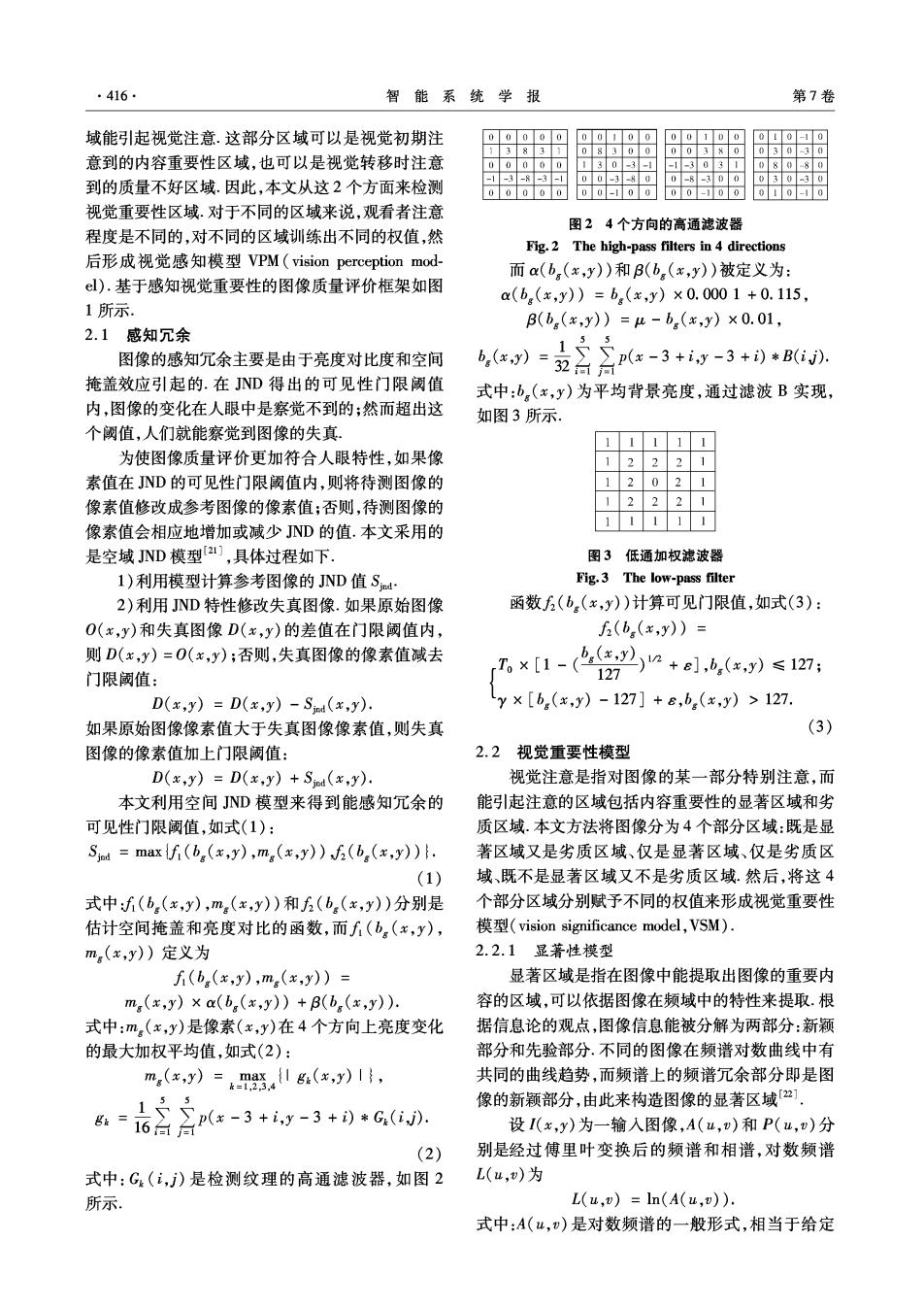
416 智能系统学报 第7卷 域能引起视觉注意.这部分区域可以是视觉初期注 00000 00100 00100 010-10 831 8300 00380 03030 意到的内容重要性区域,也可以是视觉转移时注意 00 000 130-3-1 -1-303 08080 到的质量不好区域.因此,本文从这2个方面来检测 -1 -3 -8-3-1 00-3-80 0-8-300 03030 00000 00-10000-100 010-10 视觉重要性区域.对于不同的区域来说,观看者注意 图24个方向的高通滤波器 程度是不同的,对不同的区域训练出不同的权值,然 Fig.2 The high-pass filters in 4 directions 后形成视觉感知模型VPM(vision perception mod- 而a(b,(x,y))和B(b(x,y)被定义为: ©l).基于感知视觉重要性的图像质量评价框架如图 a(bg(x,y)=b(x,y)×0.0001+0.115, 1所示. B(b(x,y))=u-b(x,y)×0.01, 2.1感知冗余 55 图像的感知冗余主要是由于亮度对比度和空间 b,(x,y)=2∑p(x-3+i,y-3+i)*B(i》 掩盖效应引起的.在JND得出的可见性门限阈值 式中:b,(x,y)为平均背景亮度,通过滤波B实现, 内,图像的变化在人眼中是察觉不到的;然而超出这 如图3所示. 个阈值,人们就能察觉到图像的失真。 为使图像质量评价更加符合人眼特性,如果像 素值在ND的可见性门限阈值内,则将待测图像的 像素值修改成参考图像的像素值;否则,待测图像的 像素值会相应地增加或减少ND的值.本文采用的 是空域JND模型2,具体过程如下, 图3低通加权滤波器 1)利用模型计算参考图像的JND值Sd Fig.3 The low-pass filter 2)利用JND特性修改失真图像.如果原始图像 函数2(b,((x,y)计算可见门限值,如式(3): O(x,y)和失真图像D(x,y)的差值在门限阈值内, f2(b(x,y)= 则D(x,y)=O(x,y);否则,失真图像的像素值减去 门限阈值: 五×[1-(7n+e14,x,)≤127: D(x,y)=D(x,y)-Sd(x,y) y×[bg(x,y)-127]+e,b(x,y)>127. 如果原始图像像素值大于失真图像像素值,则失真 (3) 图像的像素值加上门限阈值: 2.2视觉重要性模型 D(x,y)=D(x,y)+S(x,y). 视觉注意是指对图像的某一部分特别注意,而 本文利用空间JND模型来得到能感知冗余的 能引起注意的区域包括内容重要性的显著区域和劣 可见性门限阈值,如式(1): 质区域.本文方法将图像分为4个部分区域:既是显 Sjnd =maxifi(be(x,y),mg(x,y))f(b(x,y)). 著区域又是劣质区域、仅是显著区域、仅是劣质区 (1) 域、既不是显著区域又不是劣质区域.然后,将这4 式中:f(b(x,y),m(x,y)和f左(b(x,y))分别是 个部分区域分别赋予不同的权值来形成视觉重要性 估计空间掩盖和亮度对比的函数,而(b(x,y), 模型(vision significance model,VSM). m(x,y))定义为 2.2.1显著性模型 f(b.(x,y)),m.(x,y))= 显著区域是指在图像中能提取出图像的重要内 m(x,y)×a(b.(x,y))+B(b(x,y))). 容的区域,可以依据图像在频域中的特性来提取.根 式中:m(x,y)是像素(x,y)在4个方向上亮度变化 据信息论的观点,图像信息能被分解为两部分:新颖 的最大加权平均值,如式(2): 部分和先验部分.不同的图像在频谱对数曲线中有 m(x,y)=m0a(x,)1, 共同的曲线趋势,而频谱上的频谱冗余部分即是图 =12p(x-3+i,y-3+)*G(i,). 像的新颖部分,由此来构造图像的显著区域2] g=16台 设I(x,y)为一输人图像,A(u,)和P(u,v)分 (2) 别是经过傅里叶变换后的频谱和相谱,对数频谱 式中:G,(i,)是检测纹理的高通滤波器,如图2 L(u,)为 所示 L(u,v)=In(A(u,v)). 式中:A(“,)是对数频谱的一般形式,相当于给定