正在加载图片...
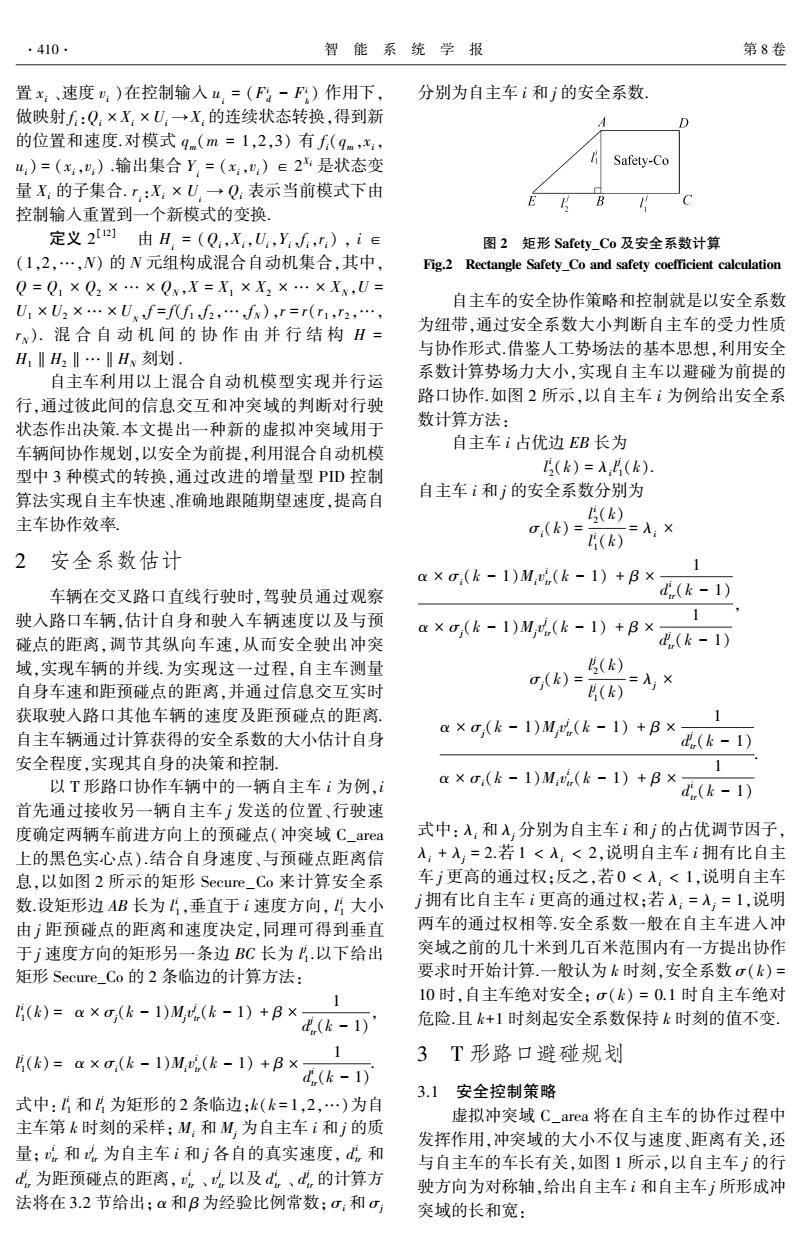
·410 智能系统学报 第8卷 置x:、速度:)在控制输入u,=(F:-F)作用下, 分别为自主车i和j的安全系数, 做映射f:Q:×X,×U,→X:的连续状态转换,得到新 D 的位置和速度.对模式q.(m=1,2,3)有f(qm,x, 4:)=(x:,:).输出集合Y,=(x,)∈24是状态变 Safety-Co 量X:的子集合.r:X,×U,→Q:表示当前模式下由 C 控制输入重置到一个新模式的变换. 定义2由H=(Q,X,U,yf,),ie 图2矩形Safety_.Co及安全系数计算 (1,2,…,N)的N元组构成混合自动机集合,其中, Fig.2 Rectangle Safety_Co and safety coefficient calculation Q=Q1×Q2×…×Qx,X=X1×X2×…×Xw,U= 自主车的安全协作策略和控制就是以安全系数 U,×U2×…×U、f=f(fi.f,…fx),r=r(r1,I2,…, T).混合自动机间的协作由并行结构H= 为纽带,通过安全系数大小判断自主车的受力性质 与协作形式.借鉴人工势场法的基本思想,利用安全 H,IH2‖…IHw刻划. 自主车利用以上混合自动机模型实现并行运 系数计算势场力大小,实现自主车以避碰为前提的 行,通过彼此间的信息交互和冲突域的判断对行驶 路口协作如图2所示,以自主车i为例给出安全系 状态作出决策本文提出一种新的虚拟冲突域用于 数计算方法: 车辆间协作规划,以安全为前提,利用混合自动机模 自主车i占优边EB长为 型中3种模式的转换,通过改进的增量型PD控制 5(k)=入,(k) 算法实现自主车快速、准确地跟随期望速度,提高自 自主车i和j的安全系数分别为 主车协作效率 5(k) 0,(k)= (k) =入:× 2安全系数估计 1 a×(k-1)Mv(k-1)+B× 车辆在交叉路口直线行驶时,驾驶员通过观察 d(k-1) 驶入路口车辆,估计自身和驶入车辆速度以及与预 碰点的距离,调节其纵向车速,从而安全驶出冲突 ax(k-1)M(-I)+B×I☐ 正n(k-1) 域,实现车辆的并线.为实现这一过程,自主车测量 g(k)= 5(k) 自身车速和距预碰点的距离,并通过信息交互实时 (k) =入:× 获取驶入路口其他车辆的速度及距预碰点的距离. 自主车辆通过计算获得的安全系数的大小估计自身 a×o(k-1)M.(k-1)+B× (k-1) 安全程度,实现其自身的决策和控制. 1 以T形路口协作车辆中的一辆自主车i为例,i a×σ:(k-1)M:(k-1)+B× d(k-1) 首先通过接收另一辆自主车j发送的位置、行驶速 度确定两辆车前进方向上的预碰点(冲突域C_area 式中:入:和入分别为自主车i和j的占优调节因子, 上的黑色实心点).结合自身速度、与预碰点距离信 入:+入=2.若1<入:<2,说明自主车i拥有比自主 息,以如图2所示的矩形Secure._Co来计算安全系 车j更高的通过权;反之,若0<入:<1,说明自主车 数.设矩形边AB长为,垂直于i速度方向,大小 j拥有比自主车i更高的通过权;若入,=入=1,说明 由j距预碰点的距离和速度决定,同理可得到垂直 两车的通过权相等.安全系数一般在自主车进入冲 于j速度方向的矩形另一条边BC长为(.以下给出 突域之前的几十米到几百米范围内有一方提出协作 矩形Secure_Co的2条临边的计算方法: 要求时开始计算.一般认为k时刻,安全系数σ(k)= 1 10时,自主车绝对安全;σ(k)=0.1时自主车绝对 (k)=a×o(k-1)M.(k-1)+B× .(k-1) 危险.且k+1时刻起安全系数保持k时刻的值不变 4()=a×(k-1)M(k-)+B×。I 3T形路口避碰规划 d,(k-1) 3.1安全控制策略 式中:和化为矩形的2条临边;k(k=1,2,…)为自 虚拟冲突域C_area将在自主车的协作过程中 主车第k时刻的采样;M和M为自主车i和j的质 发挥作用,冲突域的大小不仅与速度、距离有关,还 量;和n为自主车i和j各自的真实速度,dn和 与自主车的车长有关,如图1所示,以自主车j的行 心为距预碰点的距离,。、以及d、心,的计算方 驶方向为对称轴,给出自主车i和自主车j所形成冲 法将在3.2节给出;α和B为经验比例常数;σ:和σ, 突域的长和宽:置 xi 、速度 vi )在控制输入 u i = (F i d - F i b ) 作用下ꎬ 做映射 f i:Qi × Xi × Ui → Xi 的连续状态转换ꎬ得到新 的位置和速度.对模式 qm(m = 1ꎬ2ꎬ3) 有 f i(qm ꎬxiꎬ ui) = (xiꎬvi) .输出集合 Yi = (xiꎬvi) ∈ 2 Xi 是状态变 量 Xi 的子集合. r i :Xi × Ui → Qi 表示当前模式下由 控制输入重置到一个新模式的变换. 定义 2 [12] 由 Hi = (QiꎬXiꎬUiꎬYiꎬf iꎬri) ꎬ i ∈ (1ꎬ2ꎬꎬN) 的 N 元组构成混合自动机集合ꎬ其中ꎬ Q = Q1 × Q2 × × QNꎬX = X1 × X2 × × XNꎬU = U1 × U2 × × UN ꎬf = f(f 1 ꎬf 2 ꎬꎬfN)ꎬr = r(r1 ꎬr2 ꎬꎬ rN). 混 合 自 动 机 间 的 协 作 由 并 行 结 构 H = H1‖H2‖‖HN 刻划 . 自主车利用以上混合自动机模型实现并行运 行ꎬ通过彼此间的信息交互和冲突域的判断对行驶 状态作出决策.本文提出一种新的虚拟冲突域用于 车辆间协作规划ꎬ以安全为前提ꎬ利用混合自动机模 型中 3 种模式的转换ꎬ通过改进的增量型 PID 控制 算法实现自主车快速、准确地跟随期望速度ꎬ提高自 主车协作效率. 2 安全系数估计 车辆在交叉路口直线行驶时ꎬ驾驶员通过观察 驶入路口车辆ꎬ估计自身和驶入车辆速度以及与预 碰点的距离ꎬ调节其纵向车速ꎬ从而安全驶出冲突 域ꎬ实现车辆的并线.为实现这一过程ꎬ自主车测量 自身车速和距预碰点的距离ꎬ并通过信息交互实时 获取驶入路口其他车辆的速度及距预碰点的距离. 自主车辆通过计算获得的安全系数的大小估计自身 安全程度ꎬ实现其自身的决策和控制. 以 T 形路口协作车辆中的一辆自主车 i 为例ꎬi 首先通过接收另一辆自主车 j 发送的位置、行驶速 度确定两辆车前进方向上的预碰点(冲突域 C_area 上的黑色实心点).结合自身速度、与预碰点距离信 息ꎬ以如图 2 所示的矩形 Secure_Co 来计算安全系 数.设矩形边 AB 长为 l i 1 ꎬ垂直于 i 速度方向ꎬ l i 1 大小 由 j 距预碰点的距离和速度决定ꎬ同理可得到垂直 于 j 速度方向的矩形另一条边 BC 长为 l j 1 .以下给出 矩形 Secure_Co 的 2 条临边的计算方法: l i 1(k) = α × σj(k - 1)Mj v j tr(k - 1) + β × 1 d j tr(k - 1) ꎬ l j 1(k) = α × σi(k - 1)Mi v i tr(k - 1) + β × 1 d i tr(k - 1) . 式中: l i 1 和 l j 1 为矩形的 2 条临边ꎻk(k = 1ꎬ2ꎬ)为自 主车第 k 时刻的采样ꎻ Mi 和 Mj 为自主车 i 和 j 的质 量ꎻ v i tr 和 v j tr 为自主车 i 和 j 各自的真实速度ꎬ d i tr 和 d j tr 为距预碰点的距离ꎬ v i tr 、 v j tr 以及 d i tr 、 d j tr 的计算方 法将在 3.2 节给出ꎻ α 和 β 为经验比例常数ꎻ σi 和 σj 分别为自主车 i 和 j 的安全系数. 图 2 矩形 Safety_Co 及安全系数计算 Fig.2 Rectangle Safety_Co and safety coefficient calculation 自主车的安全协作策略和控制就是以安全系数 为纽带ꎬ通过安全系数大小判断自主车的受力性质 与协作形式.借鉴人工势场法的基本思想ꎬ利用安全 系数计算势场力大小ꎬ实现自主车以避碰为前提的 路口协作.如图 2 所示ꎬ以自主车 i 为例给出安全系 数计算方法: 自主车 i 占优边 EB 长为 l i 2(k) = λi l j 1(k). 自主车 i 和 j 的安全系数分别为 σi(k) = l i 2(k) l i 1(k) = λi × α × σi(k - 1)Mi v i tr(k - 1) + β × 1 d i tr(k - 1) α × σj(k - 1)Mj v j tr(k - 1) + β × 1 d j tr(k - 1) ꎬ σj(k) = l j 2(k) l j 1(k) = λj × α × σj(k - 1)Mj v j tr(k - 1) + β × 1 d j tr(k - 1) α × σi(k - 1)Mi v i tr(k - 1) + β × 1 d i tr(k - 1) . 式中: λi 和 λj 分别为自主车 i 和 j 的占优调节因子ꎬ λi + λj = 2.若 1 < λi < 2ꎬ说明自主车 i 拥有比自主 车 j 更高的通过权ꎻ反之ꎬ若 0 < λi < 1ꎬ说明自主车 j 拥有比自主车 i 更高的通过权ꎻ若 λi = λj = 1ꎬ说明 两车的通过权相等.安全系数一般在自主车进入冲 突域之前的几十米到几百米范围内有一方提出协作 要求时开始计算.一般认为 k 时刻ꎬ安全系数 σ(k) = 10 时ꎬ自主车绝对安全ꎻ σ(k) = 0.1 时自主车绝对 危险.且 k+1 时刻起安全系数保持 k 时刻的值不变. 3 T 形路口避碰规划 3.1 安全控制策略 虚拟冲突域 C_area 将在自主车的协作过程中 发挥作用ꎬ冲突域的大小不仅与速度、距离有关ꎬ还 与自主车的车长有关ꎬ如图 1 所示ꎬ以自主车 j 的行 驶方向为对称轴ꎬ给出自主车 i 和自主车 j 所形成冲 突域的长和宽: 410 智 能 系 统 学 报 第 8 卷