正在加载图片...
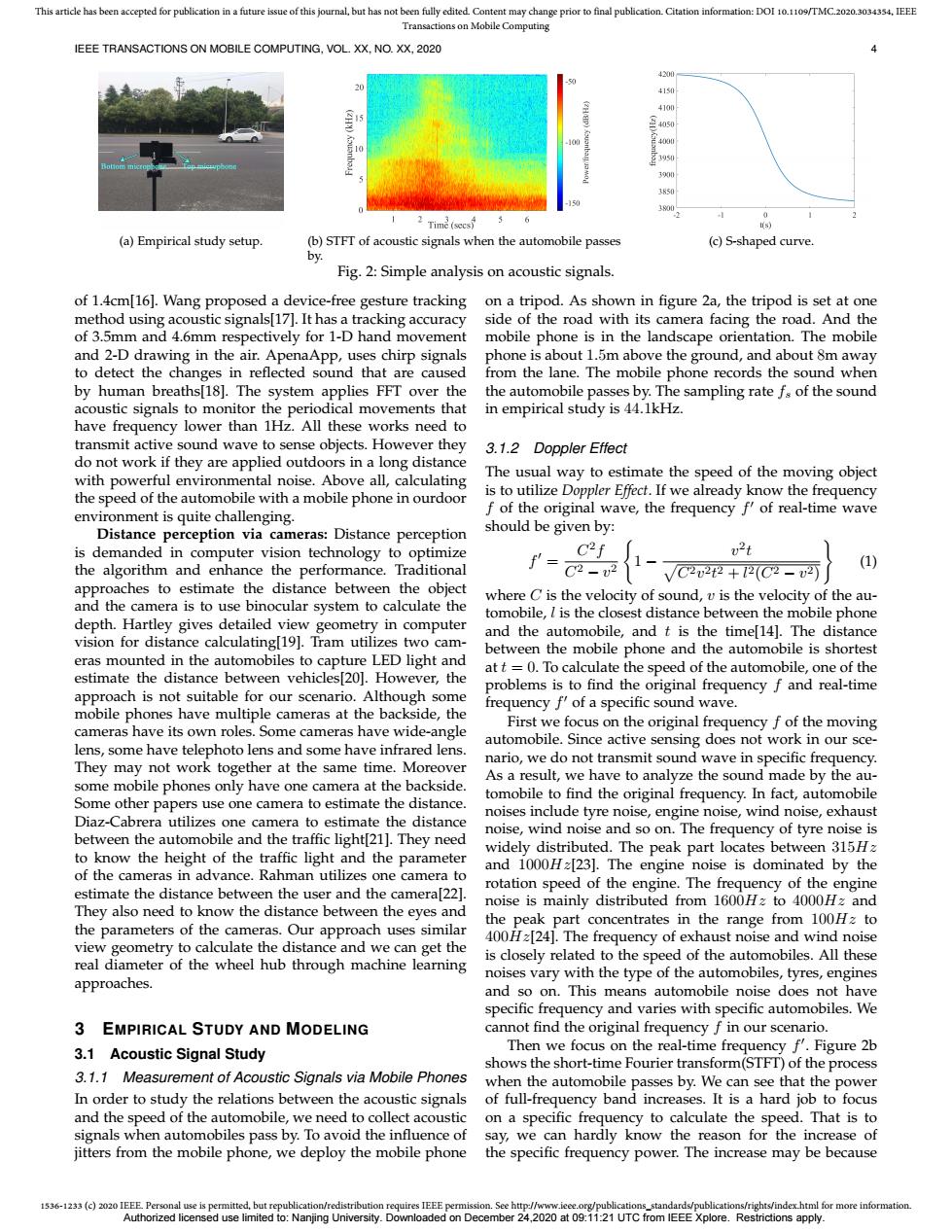
This article has been accepted for publication in a future issue of this journal,but has not been fully edited.Content may change prior to final publication.Citation information:DOI 10.1109/TMC.2020.3034354.IEEE Transactions on Mobile Computing IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 4200 415 4100 至405 30 380 2 Time (secs) (a)Empirical study setup. (b)STFT of acoustic signals when the automobile passes (c)S-shaped curve. by. Fig.2:Simple analysis on acoustic signals. of 1.4cm[16].Wang proposed a device-free gesture tracking on a tripod.As shown in figure 2a,the tripod is set at one method using acoustic signals[17].It has a tracking accuracy side of the road with its camera facing the road.And the of 3.5mm and 4.6mm respectively for 1-D hand movement mobile phone is in the landscape orientation.The mobile and 2-D drawing in the air.ApenaApp,uses chirp signals phone is about 1.5m above the ground,and about 8m away to detect the changes in reflected sound that are caused from the lane.The mobile phone records the sound when by human breaths[18].The system applies FFT over the the automobile passes by.The sampling rate fs of the sound acoustic signals to monitor the periodical movements that in empirical study is 44.1kHz. have frequency lower than 1Hz.All these works need to transmit active sound wave to sense objects.However they 3.1.2 Doppler Effect do not work if they are applied outdoors in a long distance with powerful environmental noise.Above all,calculating The usual way to estimate the speed of the moving object the speed of the automobile with a mobile phone in ourdoor is to utilize Doppler Effect.If we already know the frequency environment is quite challenging. f of the original wave,the frequency f'of real-time wave Distance perception via cameras:Distance perception should be given by: is demanded in computer vision technology to optimize v2t the algorithm and enhance the performance.Traditional f C2f (1) C2-2 VC2v2t2+12(C2-v2) approaches to estimate the distance between the object where C is the velocity of sound,v is the velocity of the au- and the camera is to use binocular system to calculate the tomobile,is the closest distance between the mobile phone depth.Hartley gives detailed view geometry in computer and the automobile,and t is the time[141.The distance vision for distance calculating[19].Tram utilizes two cam- between the mobile phone and the automobile is shortest eras mounted in the automobiles to capture LED light and at t=0.To calculate the speed of the automobile,one of the estimate the distance between vehicles[20].However,the approach is not suitable for our scenario.Although some problems is to find the original frequency f and real-time frequency f'of a specific sound wave. mobile phones have multiple cameras at the backside,the cameras have its own roles.Some cameras have wide-angle First we focus on the original frequency f of the moving automobile.Since active sensing does not work in our sce- lens,some have telephoto lens and some have infrared lens. They may not work together at the same time.Moreover nario,we do not transmit sound wave in specific frequency. As a result,we have to analyze the sound made by the au- some mobile phones only have one camera at the backside. Some other papers use one camera to estimate the distance. tomobile to find the original frequency.In fact,automobile noises include tyre noise,engine noise,wind noise,exhaust Diaz-Cabrera utilizes one camera to estimate the distance between the automobile and the traffic light[21].They need noise,wind noise and so on.The frequency of tyre noise is to know the height of the traffic light and the parameter widely distributed.The peak part locates between 315Hz and 1000Hz[23].The engine noise is dominated by the of the cameras in advance.Rahman utilizes one camera to rotation speed of the engine.The frequency of the engine estimate the distance between the user and the camera[221. noise is mainly distributed from 1600H2 to 4000Hz and They also need to know the distance between the eyes and the peak part concentrates in the range from 100Hz to the parameters of the cameras.Our approach uses similar view geometry to calculate the distance and we can get the 400Hz[24].The frequency of exhaust noise and wind noise real diameter of the wheel hub through machine learning is closely related to the speed of the automobiles.All these approaches. noises vary with the type of the automobiles,tyres,engines and so on.This means automobile noise does not have specific frequency and varies with specific automobiles.We 3 EMPIRICAL STUDY AND MODELING cannot find the original frequency f in our scenario. 3.1 Acoustic Signal Study Then we focus on the real-time frequency f.Figure 2b shows the short-time Fourier transform(STFT)of the process 3.1.1 Measurement of Acoustic Signals via Mobile Phones when the automobile passes by.We can see that the power In order to study the relations between the acoustic signals of full-frequency band increases.It is a hard job to focus and the speed of the automobile,we need to collect acoustic on a specific frequency to calculate the speed.That is to signals when automobiles pass by.To avoid the influence of say,we can hardly know the reason for the increase of jitters from the mobile phone,we deploy the mobile phone the specific frequency power.The increase may be because 36-1233(c)2020 IEEE Personal use is permitted,but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. Authorized licensed use limited to:Nanjing University.Downloaded on December 24,2020 at 09:11:21 UTC from IEEE Xplore.Restrictions apply.1536-1233 (c) 2020 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMC.2020.3034354, IEEE Transactions on Mobile Computing IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 4 (a) Empirical study setup. (b) STFT of acoustic signals when the automobile passes by. (c) S-shaped curve. Fig. 2: Simple analysis on acoustic signals. of 1.4cm[16]. Wang proposed a device-free gesture tracking method using acoustic signals[17]. It has a tracking accuracy of 3.5mm and 4.6mm respectively for 1-D hand movement and 2-D drawing in the air. ApenaApp, uses chirp signals to detect the changes in reflected sound that are caused by human breaths[18]. The system applies FFT over the acoustic signals to monitor the periodical movements that have frequency lower than 1Hz. All these works need to transmit active sound wave to sense objects. However they do not work if they are applied outdoors in a long distance with powerful environmental noise. Above all, calculating the speed of the automobile with a mobile phone in ourdoor environment is quite challenging. Distance perception via cameras: Distance perception is demanded in computer vision technology to optimize the algorithm and enhance the performance. Traditional approaches to estimate the distance between the object and the camera is to use binocular system to calculate the depth. Hartley gives detailed view geometry in computer vision for distance calculating[19]. Tram utilizes two cameras mounted in the automobiles to capture LED light and estimate the distance between vehicles[20]. However, the approach is not suitable for our scenario. Although some mobile phones have multiple cameras at the backside, the cameras have its own roles. Some cameras have wide-angle lens, some have telephoto lens and some have infrared lens. They may not work together at the same time. Moreover some mobile phones only have one camera at the backside. Some other papers use one camera to estimate the distance. Diaz-Cabrera utilizes one camera to estimate the distance between the automobile and the traffic light[21]. They need to know the height of the traffic light and the parameter of the cameras in advance. Rahman utilizes one camera to estimate the distance between the user and the camera[22]. They also need to know the distance between the eyes and the parameters of the cameras. Our approach uses similar view geometry to calculate the distance and we can get the real diameter of the wheel hub through machine learning approaches. 3 EMPIRICAL STUDY AND MODELING 3.1 Acoustic Signal Study 3.1.1 Measurement of Acoustic Signals via Mobile Phones In order to study the relations between the acoustic signals and the speed of the automobile, we need to collect acoustic signals when automobiles pass by. To avoid the influence of jitters from the mobile phone, we deploy the mobile phone on a tripod. As shown in figure 2a, the tripod is set at one side of the road with its camera facing the road. And the mobile phone is in the landscape orientation. The mobile phone is about 1.5m above the ground, and about 8m away from the lane. The mobile phone records the sound when the automobile passes by. The sampling rate fs of the sound in empirical study is 44.1kHz. 3.1.2 Doppler Effect The usual way to estimate the speed of the moving object is to utilize Doppler Effect. If we already know the frequency f of the original wave, the frequency f 0 of real-time wave should be given by: f 0 = C 2f C2 − v 2 ( 1 − v 2 t p C2v 2t 2 + l 2(C2 − v 2) ) (1) where C is the velocity of sound, v is the velocity of the automobile, l is the closest distance between the mobile phone and the automobile, and t is the time[14]. The distance between the mobile phone and the automobile is shortest at t = 0. To calculate the speed of the automobile, one of the problems is to find the original frequency f and real-time frequency f 0 of a specific sound wave. First we focus on the original frequency f of the moving automobile. Since active sensing does not work in our scenario, we do not transmit sound wave in specific frequency. As a result, we have to analyze the sound made by the automobile to find the original frequency. In fact, automobile noises include tyre noise, engine noise, wind noise, exhaust noise, wind noise and so on. The frequency of tyre noise is widely distributed. The peak part locates between 315Hz and 1000Hz[23]. The engine noise is dominated by the rotation speed of the engine. The frequency of the engine noise is mainly distributed from 1600Hz to 4000Hz and the peak part concentrates in the range from 100Hz to 400Hz[24]. The frequency of exhaust noise and wind noise is closely related to the speed of the automobiles. All these noises vary with the type of the automobiles, tyres, engines and so on. This means automobile noise does not have specific frequency and varies with specific automobiles. We cannot find the original frequency f in our scenario. Then we focus on the real-time frequency f 0 . Figure 2b shows the short-time Fourier transform(STFT) of the process when the automobile passes by. We can see that the power of full-frequency band increases. It is a hard job to focus on a specific frequency to calculate the speed. That is to say, we can hardly know the reason for the increase of the specific frequency power. The increase may be because Authorized licensed use limited to: Nanjing University. Downloaded on December 24,2020 at 09:11:21 UTC from IEEE Xplore. Restrictions apply