正在加载图片...
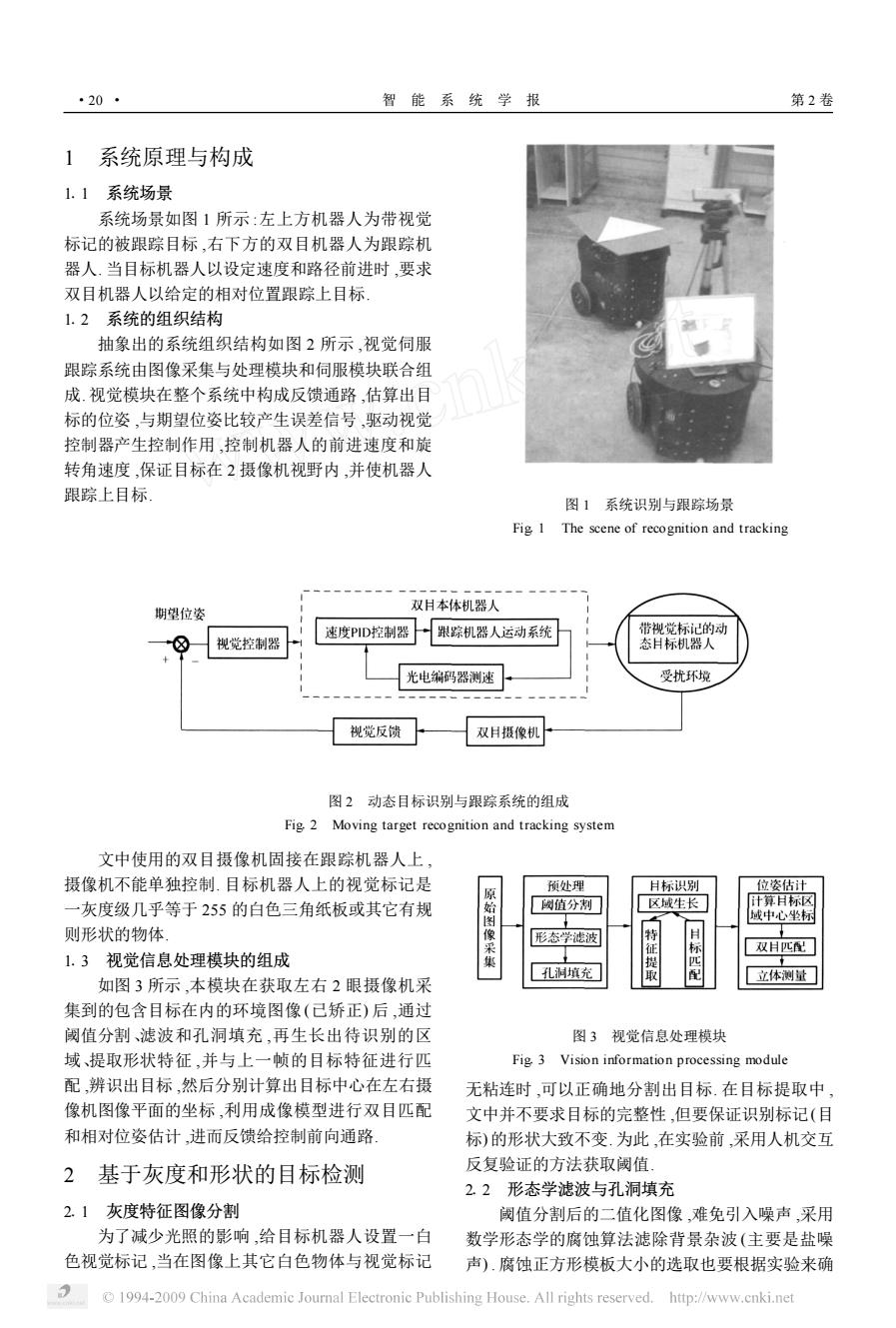
·20· 智能系统学报 第2卷 1系统原理与构成 1.1系统场景 系统场景如图1所示:左上方机器人为带视觉 标记的被跟踪目标,右下方的双目机器人为跟踪机 器人.当目标机器人以设定速度和路径前进时,要求 双目机器人以给定的相对位置跟踪上目标 1.2系统的组织结构 抽象出的系统组织结构如图2所示,视觉伺服 跟踪系统由图像采集与处理模块和伺服模块联合组 成.视觉模块在整个系统中构成反馈通路,估算出目 标的位姿,与期望位姿比较产生误差信号,驱动视觉 控制器产生控制作用,控制机器人的前进速度和旋 转角速度,保证目标在2摄像机视野内,并使机器人 跟踪上目标」 图1系统识别与跟踪场景 Fig 1 The scene of recognition and tracking 期望位姿 双日本体机器人 速度PID控制器 跟踪机器人运动系统 带视觉标记的动 视觉控制器 态H标机器人 光电编码器测速 受扰环境 视觉反馈 双目摄像机 图2动态目标识别与跟踪系统的组成 Fig,2 Moving target recognition and tracking system 文中使用的双目摄像机固接在跟踪机器人上, 摄像机不能单独控制.目标机器人上的视觉标记是 预处理 月标识别 位姿估计 一灰度级几乎等于255的白色三角纸板或其它有规 原始图像采集 圆值分制 区城生长 计算目标区 域中心坐标 则形状的物体 形态学滤波 双日匹配 1.3视觉信息处理模块的组成 孔洞填充 取 配 立体测量 如图3所示,本模块在获取左右2眼摄像机采 集到的包含目标在内的环境图像(已矫正)后,通过 阈值分割、滤波和孔洞填充,再生长出待识别的区 图3视觉信息处理模块 域、提取形状特征,并与上一帧的目标特征进行匹 Fig 3 Vision information processing module 配,辨识出目标,然后分别计算出目标中心在左右摄 无粘连时,可以正确地分割出目标.在目标提取中 像机图像平面的坐标,利用成像模型进行双目匹配 文中并不要求目标的完整性,但要保证识别标记(目 和相对位姿估计,进而反馈给控制前向通路」 标)的形状大致不变.为此,在实验前,采用人机交互 2基于灰度和形状的日标检测 反复验证的方法获取阈值 2.2形态学滤波与孔洞填充 2.1灰度特征图像分割 阈值分割后的二值化图像,难免引入噪声,采用 为了减少光照的影响,给目标机器人设置一白 数学形态学的腐蚀算法滤除背景杂波(主要是盐噪 色视觉标记,当在图像上其它白色物体与视觉标记 声).腐蚀正方形模板大小的选取也要根据实验来确 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net1 系统原理与构成 111 系统场景 系统场景如图 1 所示 :左上方机器人为带视觉 标记的被跟踪目标 ,右下方的双目机器人为跟踪机 器人. 当目标机器人以设定速度和路径前进时 ,要求 双目机器人以给定的相对位置跟踪上目标. 112 系统的组织结构 抽象出的系统组织结构如图 2 所示 ,视觉伺服 跟踪系统由图像采集与处理模块和伺服模块联合组 成. 视觉模块在整个系统中构成反馈通路 ,估算出目 标的位姿 ,与期望位姿比较产生误差信号 ,驱动视觉 控制器产生控制作用 ,控制机器人的前进速度和旋 转角速度 ,保证目标在 2 摄像机视野内 ,并使机器人 跟踪上目标. 图 1 系统识别与跟踪场景 Fig11 The scene of recognition and tracking 图 2 动态目标识别与跟踪系统的组成 Fig12 Moving target recognition and tracking system 文中使用的双目摄像机固接在跟踪机器人上 , 摄像机不能单独控制. 目标机器人上的视觉标记是 一灰度级几乎等于 255 的白色三角纸板或其它有规 则形状的物体. 113 视觉信息处理模块的组成 如图 3 所示 ,本模块在获取左右 2 眼摄像机采 集到的包含目标在内的环境图像 (已矫正) 后 ,通过 阈值分割、滤波和孔洞填充 ,再生长出待识别的区 域、提取形状特征 ,并与上一帧的目标特征进行匹 配 ,辨识出目标 ,然后分别计算出目标中心在左右摄 像机图像平面的坐标 ,利用成像模型进行双目匹配 和相对位姿估计 ,进而反馈给控制前向通路. 2 基于灰度和形状的目标检测 211 灰度特征图像分割 为了减少光照的影响 ,给目标机器人设置一白 色视觉标记 ,当在图像上其它白色物体与视觉标记 图 3 视觉信息处理模块 Fig13 Vision information processing module 无粘连时 ,可以正确地分割出目标. 在目标提取中 , 文中并不要求目标的完整性 ,但要保证识别标记(目 标) 的形状大致不变. 为此 ,在实验前 ,采用人机交互 反复验证的方法获取阈值. 212 形态学滤波与孔洞填充 阈值分割后的二值化图像 ,难免引入噪声 ,采用 数学形态学的腐蚀算法滤除背景杂波 (主要是盐噪 声) . 腐蚀正方形模板大小的选取也要根据实验来确 ·20 · 智 能 系 统 学 报 第 2 卷