正在加载图片...
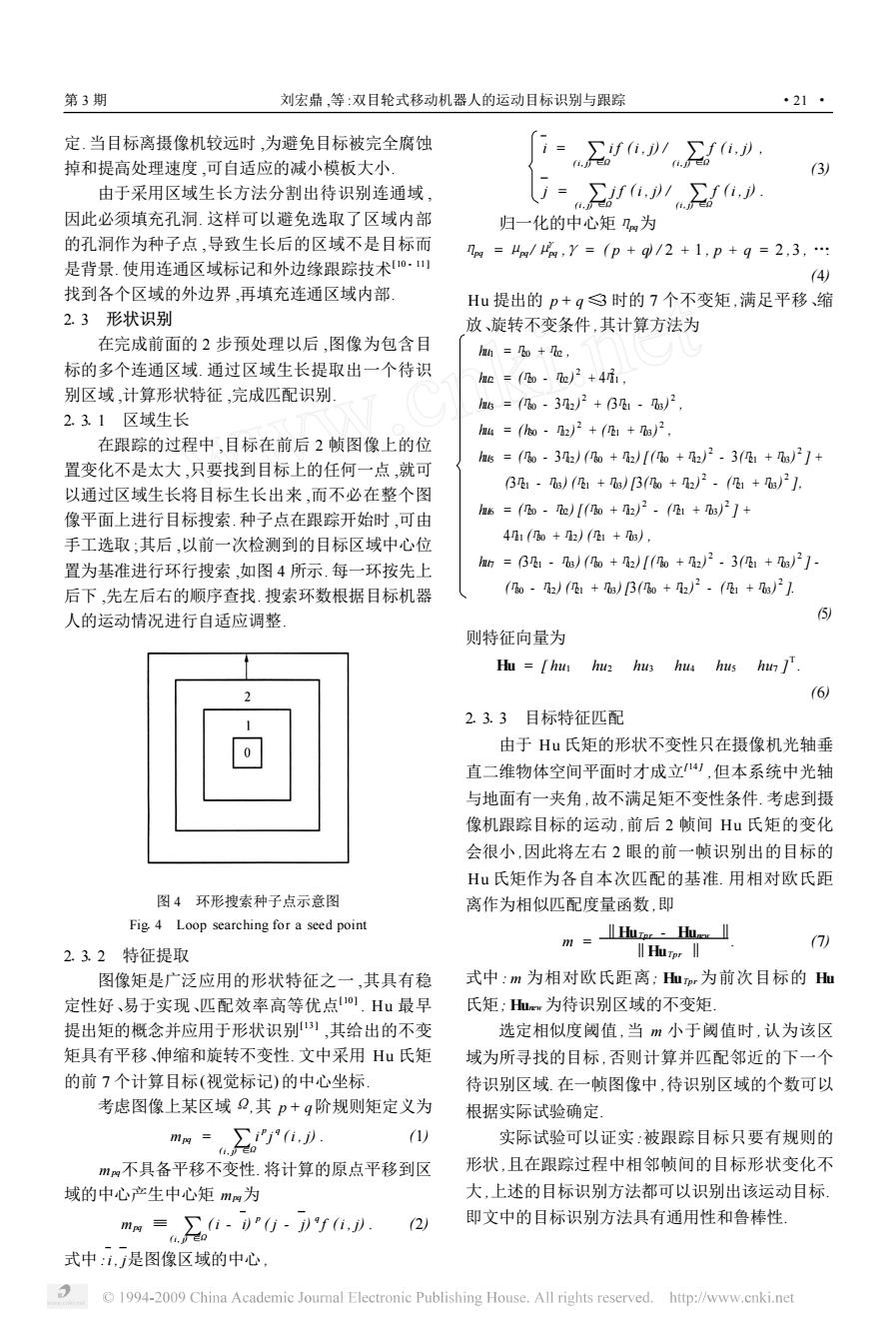
第3期 刘宏鼎,等:双目轮式移动机器人的运动目标识别与跟踪 ·21· 定.当目标离摄像机较远时,为避免目标被完全腐蚀 fi,1∑fi,, 掉和提高处理速度,可自适应的减小模板大小 .o (3) 由于采用区域生长方法分割出待识别连通域, ru.pl j= 因此必须填充孔洞.这样可以避免选取了区域内部 归一化的中心矩为 的孔洞作为种子点,导致生长后的区域不是目标而 g=“g/,Y=(p+/2+1,p+g=2,3,: 是背景.使用连通区域标记和外边缘跟踪技术0山 (4) 找到各个区域的外边界,再填充连通区域内部, Hu提出的p+q3时的7个不变矩,满足平移、缩 2.3形状识别 放、旋转不变条件,其计算方法为 在完成前面的2步预处理以后,图像为包含目 haun =bo he 标的多个连通区域.通过区域生长提取出一个待识 he =(Tbo-e) 别区域,计算形状特征,完成匹配识别, s=(0-32+6:-s)2, 2.3.1区域生长 hu=(ho·2+h1+2, 在跟踪的过程中,目标在前后2帧图像上的位 h6=(0-3z)0+2[o+22.31+21+ 置变化不是太大,只要找到目标上的任何一点,就可 6h-s)仍1+s)B0+22.1+s21, 以通过区域生长将目标生长出来,而不必在整个图 s=(o-)[(o+2.(1+s)2]+ 像平面上进行目标搜索.种子点在跟踪开始时,可由 手工选取,其后,以前一次检测到的目标区域中心位 4h1(o+2)(B1+), 置为基准进行环行搜索,如图4所示.每一环按先上 hh=6h:-0+2[o+22.31+s21- 后下,先左后右的顺序查找.搜索环数根据目标机器 (0·(+s)B0+2.(h+s21 人的运动情况进行自适应调整 ) 则特征向量为 Hu [hu huz hushus hus hu 2 6) 2.3.3目标特征匹配 由于Hu氏矩的形状不变性只在摄像机光轴垂 直二维物体空间平面时才成立4),但本系统中光轴 与地面有一夹角,故不满足矩不变性条件.考虑到摄 像机跟踪目标的运动,前后2帧间Hu氏矩的变化 会很小,因此将左右2眼的前一帧识别出的目标的 Hu氏矩作为各自本次匹配的基准.用相对欧氏距 图4环形搜索种子点示意图 离作为相似匹配度量函数,即 Fig 4 Loop searching for a seed point m =IEuzer-Huo ll 2.3.2特征提取 HuTpr‖ 7) 图像矩是广泛应用的形状特征之一,其具有稳 式中:m为相对欧氏距离:Hupr为前次目标的u 定性好、易于实现、匹配效率高等优点,.Hu最早 氏矩,H为待识别区域的不变矩 提出矩的概念并应用于形状识别!,其给出的不变 选定相似度阈值,当m小于阈值时,认为该区 矩具有平移、伸缩和旋转不变性.文中采用H山氏矩 域为所寻找的目标,否则计算并匹配邻近的下一个 的前7个计算目标(视觉标记)的中心坐标 待识别区域.在一帧图像中,待识别区域的个数可以 考虑图像上某区域P,其p+g阶规则矩定义为 根据实际试验确定 m网=∑Pj(i, 1) 实际试验可以证实:被跟踪目标只要有规则的 i.0 mm不具备平移不变性.将计算的原点平移到区 形状,且在跟踪过程中相邻帧间的目标形状变化不 域的中心产生中心矩m网为 大,上述的目标识别方法都可以识别出该运动目标 mo =i.o(j-pf(i.p. 2 即文中的目标识别方法具有通用性和鲁棒性。 式中:i,j是图像区域的中心, 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net定. 当目标离摄像机较远时 ,为避免目标被完全腐蚀 掉和提高处理速度 ,可自适应的减小模板大小. 由于采用区域生长方法分割出待识别连通域 , 因此必须填充孔洞. 这样可以避免选取了区域内部 的孔洞作为种子点 ,导致生长后的区域不是目标而 是背景. 使用连通区域标记和外边缘跟踪技术[10 - 11 ] 找到各个区域的外边界 ,再填充连通区域内部. 213 形状识别 在完成前面的 2 步预处理以后 ,图像为包含目 标的多个连通区域. 通过区域生长提取出一个待识 别区域 ,计算形状特征 ,完成匹配识别. 21311 区域生长 在跟踪的过程中 ,目标在前后 2 帧图像上的位 置变化不是太大 ,只要找到目标上的任何一点 ,就可 以通过区域生长将目标生长出来 ,而不必在整个图 像平面上进行目标搜索. 种子点在跟踪开始时 ,可由 手工选取 ;其后 ,以前一次检测到的目标区域中心位 置为基准进行环行搜索 ,如图 4 所示. 每一环按先上 后下 ,先左后右的顺序查找. 搜索环数根据目标机器 人的运动情况进行自适应调整. 图 4 环形搜索种子点示意图 Fig14 Loop searching for a seed point 21312 特征提取 图像矩是广泛应用的形状特征之一 ,其具有稳 定性好、易于实现、匹配效率高等优点[10 ] . Hu 最早 提出矩的概念并应用于形状识别[13 ] ,其给出的不变 矩具有平移、伸缩和旋转不变性. 文中采用 Hu 氏矩 的前 7 个计算目标(视觉标记) 的中心坐标. 考虑图像上某区域Ω,其 p + q 阶规则矩定义为 mpq = ( i ,∑ j) ∈Ω i p j q ( i , j) . (1) mpq不具备平移不变性. 将计算的原点平移到区 域的中心产生中心矩 mpq为 mpq ≡( i ,∑ j) ∈Ω ( i - i) p ( j - j) q f ( i , j) . (2) 式中 :i , j是图像区域的中心 , i = ( i ,∑ j) ∈Ω i f ( i , j) / ( i ,∑ j) ∈Ω f ( i , j) , j = ( i ,∑ j) ∈Ω j f ( i , j) / ( i ,∑ j) ∈Ω f ( i , j) . (3) 归一化的中心矩ηpq为 ηpq = μpq /μγ pq ,γ = ( p + q) / 2 + 1 , p + q = 2 ,3 , …. (4) Hu 提出的 p + q ≤3 时的 7 个不变矩 ,满足平移、缩 放、旋转不变条件 ,其计算方法为 hu1 =η20 +η02 , hu2 = (η20 - η02 ) 2 + 4η2 11 , hu3 = (η30 - 3η12 ) 2 + (3η21 - η03 ) 2 , hu4 = ( h30 - η12 ) 2 + (η21 +η03 ) 2 , hu5 = (η30 - 3η12 ) (η30 +η12 ) [(η30 +η12 ) 2 - 3(η21 +η03 ) 2 ] + (3η21 - η03 ) (η21 +η03 ) [3(η30 +η12 ) 2 - (η21 +η03 ) 2 ], hu6 = (η20 - η02 ) [(η30 +η12 ) 2 - (η21 +η03 ) 2 ] + 4η11 (η30 +η12 ) (η21 +η03 ) , hu7 = (3η21 - η03 ) (η30 +η12 ) [(η30 +η12 ) 2 - 3(η21 +η03 ) 2 ] - (η30 - η12 ) (η21 +η03 ) [3(η30 +η12 ) 2 - (η21 +η03 ) 2 ]. (5) 则特征向量为 Hu = [ hu1 hu2 hu3 hu4 hu5 hu7 ] T . (6) 21313 目标特征匹配 由于 Hu 氏矩的形状不变性只在摄像机光轴垂 直二维物体空间平面时才成立[14 ] ,但本系统中光轴 与地面有一夹角 ,故不满足矩不变性条件. 考虑到摄 像机跟踪目标的运动 ,前后 2 帧间 Hu 氏矩的变化 会很小 ,因此将左右 2 眼的前一帧识别出的目标的 Hu 氏矩作为各自本次匹配的基准. 用相对欧氏距 离作为相似匹配度量函数 ,即 m = ‖HuTpr - Hunew ‖ ‖HuTpr ‖ . (7) 式中 : m 为相对欧氏距离; HuTpr 为前次目标的 Hu 氏矩; Hunew 为待识别区域的不变矩. 选定相似度阈值 ,当 m 小于阈值时 ,认为该区 域为所寻找的目标 ,否则计算并匹配邻近的下一个 待识别区域. 在一帧图像中 ,待识别区域的个数可以 根据实际试验确定. 实际试验可以证实 :被跟踪目标只要有规则的 形状 ,且在跟踪过程中相邻帧间的目标形状变化不 大 ,上述的目标识别方法都可以识别出该运动目标. 即文中的目标识别方法具有通用性和鲁棒性. 第 3 期 刘宏鼎 ,等 :双目轮式移动机器人的运动目标识别与跟踪 ·21 ·