正在加载图片...
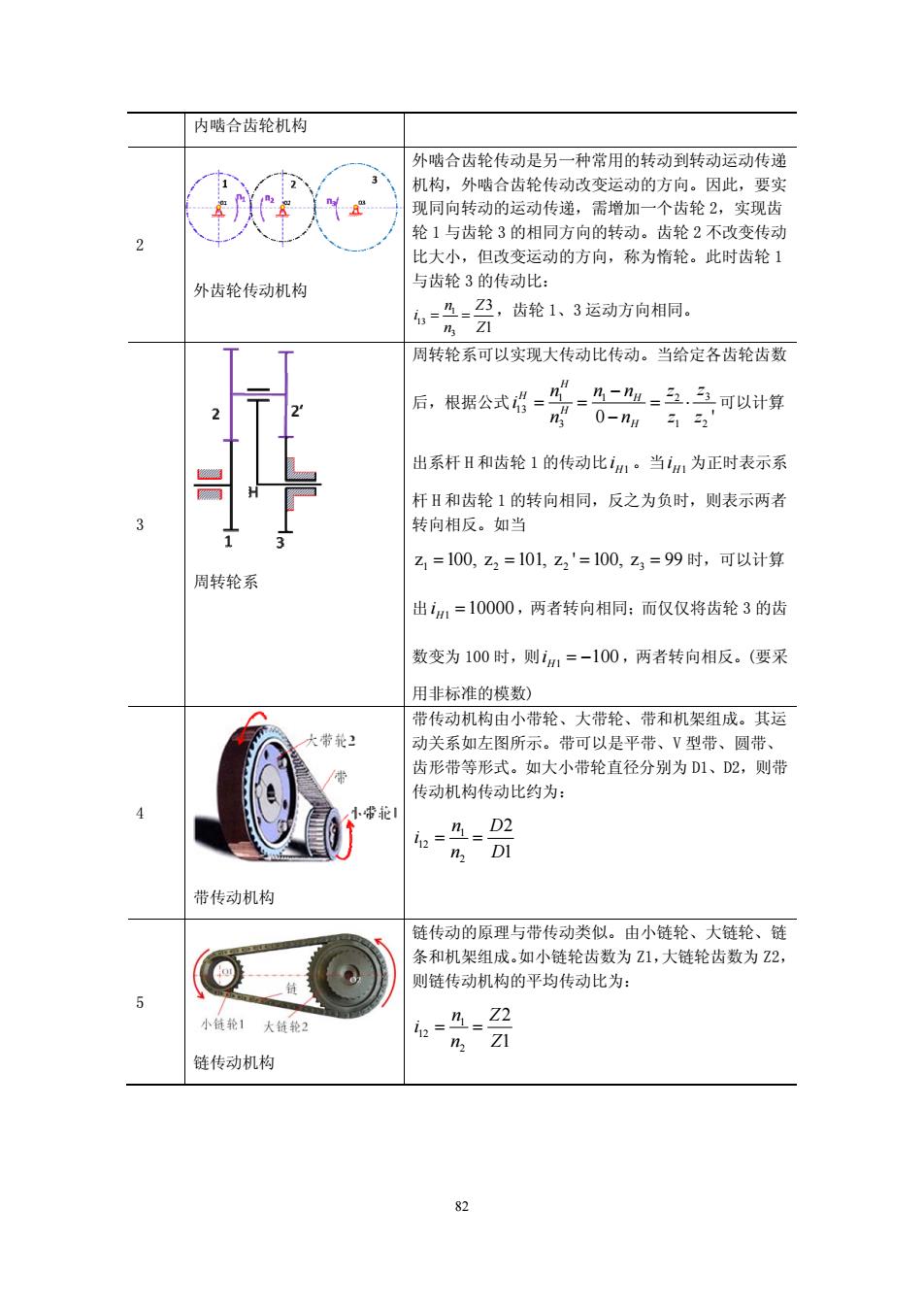
内啮合齿轮机构 外啮合齿轮传动是另一种常用的转动到转动运动传递 机构,外啮合齿轮传动改变运动的方向。因此,要实 现同向转动的运动传递,需增加一个齿轮2,实现齿 轮1与齿轮3的相同方向的转动。齿轮2不改变传动 比大小,但改变运动的方向,称为惰轮。此时齿轮1 外齿轮传动机构 与齿轮3的传动比: ,-4=三,齿轮1、3运动方向相同。 n Zl 周转轮系可以实现大传动比传动。当给定各齿轮齿数 后, 根据公式增-%=么二三三.三可以计算 n50-ng52 出系杆H和齿轮1的传动比iu1。当i1为正时表示系 杆H和齿轮1的转向相同,反之为负时,则表示两者 转向相反。如当 Z1=100,Z2=101,Z,'=100,z3=99时,可以计算 周转轮系 出i,=10000,两者转向相同:而仅仅将齿轮3的齿 数变为100时,则i=-100,两者转向相反。(要采 用非标准的模数) 带传动机构由小带轮、大带轮、带和机架组成。其运 大带轮2 动关系如左图所示。带可以是平带、V型带、圆带、 齿形带等形式。如大小带轮直径分别为D1、D2,则带 传动机构传动比约为: 小带花1 2= D2 n,DI 带传动机构 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。如小链轮齿数为Z1,大链轮齿数为Z2, 则链传动机构的平均传动比为: 5 小链轮1 大链轮2 链传动机构 8282 内啮合齿轮机构 2 外齿轮传动机构 外啮合齿轮传动是另一种常用的转动到转动运动传递 机构,外啮合齿轮传动改变运动的方向。因此,要实 现同向转动的运动传递,需增加一个齿轮 2,实现齿 轮 1 与齿轮 3 的相同方向的转动。齿轮 2 不改变传动 比大小,但改变运动的方向,称为惰轮。此时齿轮 1 与齿轮 3 的传动比: 1 13 3 3 1 n Z i n Z = = ,齿轮 1、3 运动方向相同。 3 周转轮系 周转轮系可以实现大传动比传动。当给定各齿轮齿数 后,根据公式 11 2 3 13 3 12 0 ' H H H H H n nn z z i n n zz − = = =⋅ − 可以计算 出系杆 H 和齿轮 1 的传动比 H1 i 。当 H1 i 为正时表示系 杆 H 和齿轮 1 的转向相同,反之为负时,则表示两者 转向相反。如当 122 3 z 100, z 101, z ' 100, z 99 = = == 时,可以计算 出 1 10000 Hi = ,两者转向相同;而仅仅将齿轮 3 的齿 数变为 100 时,则 1 100 Hi = − ,两者转向相反。(要采 用非标准的模数) 4 带传动机构 带传动机构由小带轮、大带轮、带和机架组成。其运 动关系如左图所示。带可以是平带、V 型带、圆带、 齿形带等形式。如大小带轮直径分别为 D1、D2,则带 传动机构传动比约为: 1 12 2 2 1 n D i n D = = 5 链传动机构 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。如小链轮齿数为 Z1,大链轮齿数为 Z2, 则链传动机构的平均传动比为: 1 12 2 2 1 n Z i n Z = =