正在加载图片...
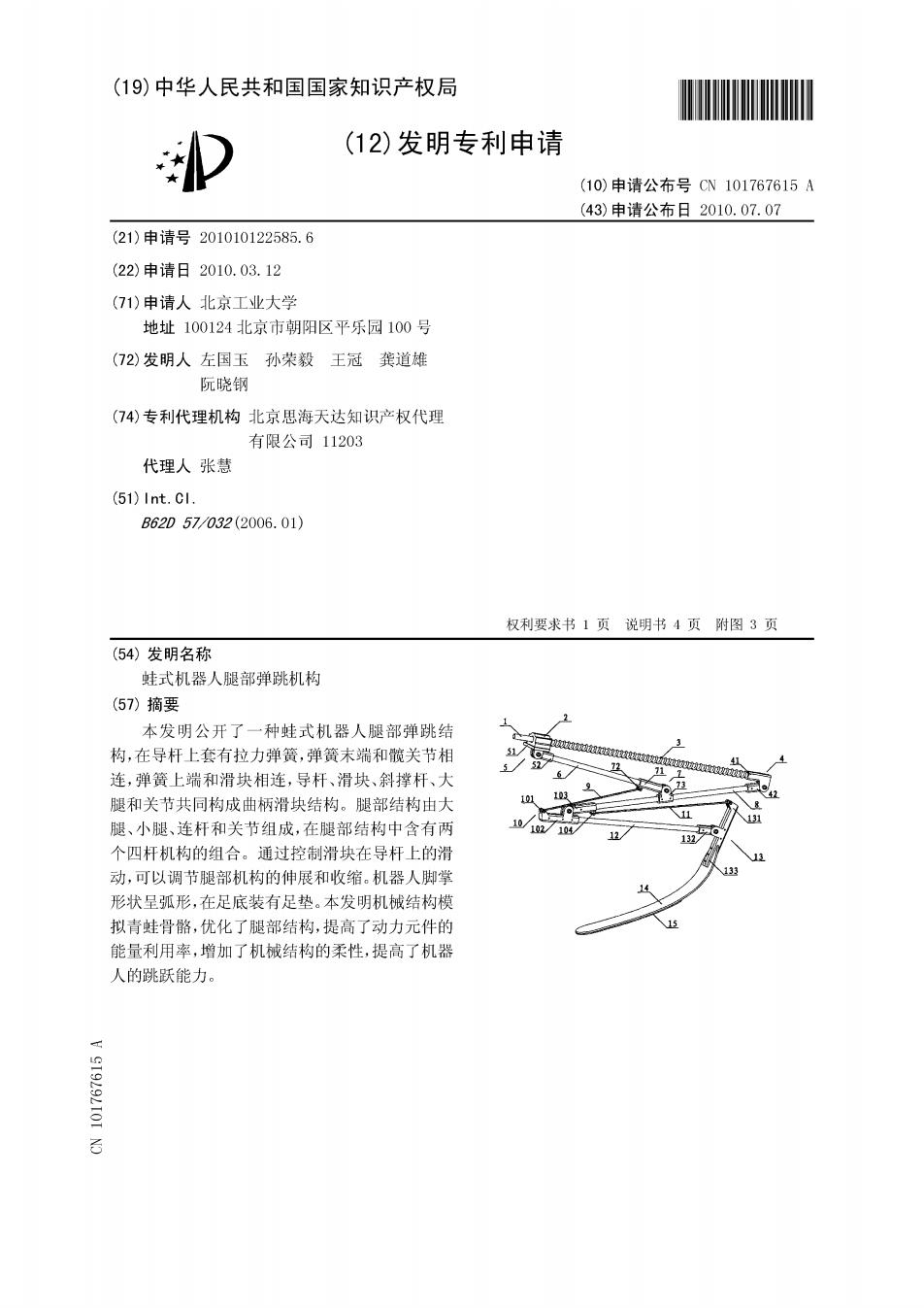
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN101767615A (43)申请公布日2010.07.07 (21)申请号201010122585.6 (22)申请日2010.03.12 (71)申请人北京工业大学 地址100124北京市朝阳区平乐园100号 (72)发明人左国玉孙荣毅王冠龚道雄 阮晓钢 (74)专利代理机构北京思海天达知识产权代理 有限公司11203 代理人张慧 (51)Int.CI. B62057032(2006.01) 权利要求书1页说明书4页附图3页 (54)发明名称 蛙式机器人腿部弹跳机构 (57)摘要 本发明公开了一种蛙式机器人腿部弹跳结 构,在导杆上套有拉力弹簧,弹簧末端和髋关节相 51/ 27 72 连,弹簧上端和滑块相连,导杆、滑块、斜撑杆、大 6 11 23 腿和关节共同构成曲柄滑块结构。腿部结构由大 1 13 腿、小腿、连杆和关节组成,在腿部结构中含有两 10/102/104/ 131 132 个四杆机构的组合。通过控制滑块在导杆上的滑 动,可以调节腿部机构的伸展和收缩。机器人脚掌 33 形状呈弧形,在足底装有足垫。本发明机械结构模 拟青蛙骨骼,优化了腿部结构,提高了动力元件的 能量利用率,增加了机械结构的柔性,提高了机器 人的跳跃能力