正在加载图片...
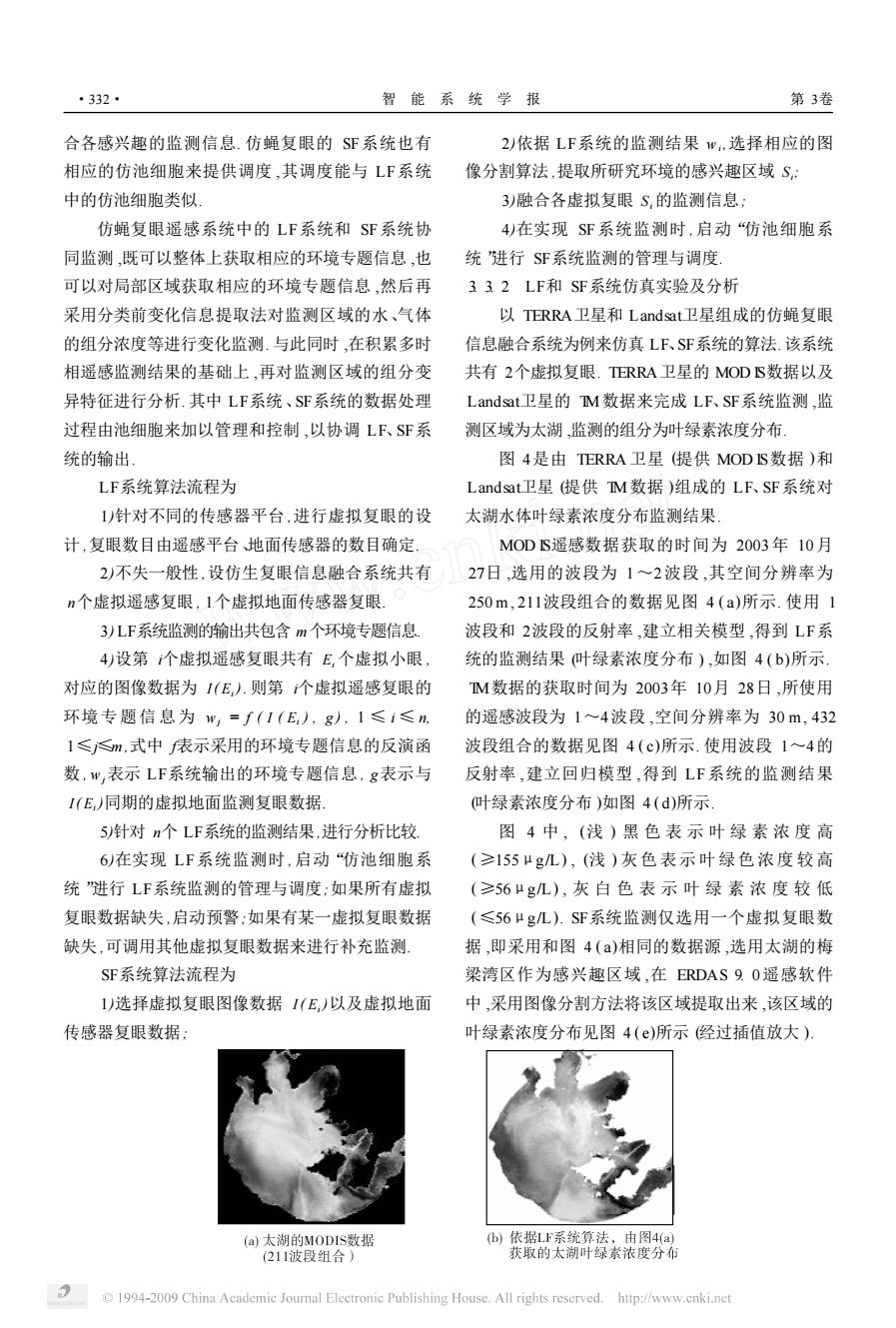
·332· 智能系统学报 第3卷 合各感兴趣的监测信息.仿蝇复眼的S℉系统也有 2)依据LF系统的监测结果w,选择相应的图 相应的仿池细胞来提供调度,其调度能与LF系统 像分割算法,提取所研究环境的感兴趣区域S,: 中的仿池细胞类似 3)融合各虚拟复眼S的监测信息; 仿蝇复眼遥感系统中的LF系统和SF系统协 4)在实现SF系统监测时,启动“彷池细胞系 同监测,既可以整体上获取相应的环境专题信息,也 统进行SF系统监测的管理与调度 可以对局部区域获取相应的环境专题信息,然后再 332LF和SF系统仿真实验及分析 采用分类前变化信息提取法对监测区域的水、气体 以TERRA卫星和Landsat卫星组成的仿蝇复眼 的组分浓度等进行变化监测.与此同时,在积累多时 信息融合系统为例来仿真LF、SF系统的算法.该系统 相遥感监测结果的基础上,再对监测区域的组分变 共有2个虚拟复眼.TERRA卫星的MODS数据以及 异特征进行分析.其中LF系统、SF系统的数据处理 Landsat卫星的M数据来完成LF、SF系统监测,监 过程由池细胞来加以管理和控制,以协调LF、SF系 测区域为太湖,监测的组分为叶绿素浓度分布 统的输出」 图4是由TERRA卫星(提供MOD IS数据)和 LF系统算法流程为 Landsat卫星(提供M数据)组成的LF、SF系统对 1)针对不同的传感器平台,进行虚拟复眼的设 太湖水体叶绿素浓度分布监测结果 计,复眼数目由遥感平台、地面传感器的数目确定 MODS遥感数据获取的时间为2003年10月 2不失一般性,设仿生复眼信息融合系统共有27日,选用的波段为1~2波段,其空间分辨率为 n个虚拟遥感复眼,1个虚拟地面传感器复眼 250m,211波段组合的数据见图4(a)所示.使用1 3)LF系统监测的输出共包含m个环境专题信息. 波段和2波段的反射率,建立相关模型,得到LF系 4)设第个虚拟遥感复眼共有E,个虚拟小眼, 统的监测结果叶绿素浓度分布),如图4(b)所示 对应的图像数据为1(E,).则第个虚拟遥感复眼的 M数据的获取时间为2003年10月28日,所使用 环境专题信息为w,=∫(1(E,),g),1≤i≤n 的遥感波段为1~4波段,空间分辨率为30m,432 1≤≤m,式中表示采用的环境专题信息的反演函 波段组合的数据见图4(c)所示.使用波段1一4的 数,w,表示LF系统输出的环境专题信息,g表示与 反射率,建立回归模型,得到LF系统的监测结果 1(E,同期的虚拟地面监测复眼数据 叶绿素浓度分布)如图4(d)所示 5)针对n个LF系统的监测结果,进行分析比较 图4中,(浅)黑色表示叶绿素浓度高 6)在实现LF系统监测时,启动“仿池细胞系 (≥155μgL),(浅)灰色表示叶绿色浓度较高 统”进行LF系统监测的管理与调度:如果所有虚拟 (≥56μgL),灰白色表示叶绿素浓度较低 复眼数据缺失,启动预警:如果有某一虚拟复眼数据 (≤56μgL).SF系统监测仅选用一个虚拟复眼数 缺失,可调用其他虚拟复眼数据来进行补充监测 据,即采用和图4(a)相同的数据源,选用太湖的梅 SF系统算法流程为 梁湾区作为感兴趣区域,在ERDAS9.0遥感软件 1)选择虚拟复眼图像数据1(E,)以及虚拟地面 中,采用图像分割方法将该区域提取出来,该区域的 传感器复眼数据: 叶绿素浓度分布见图4()所示经过插值放大). (a)太湖的MODIS数掘 (b)依据LF系统算法,由图4(a (211波段组合) 获取的太湖叶绿素浓度分布 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net合各感兴趣的监测信息. 仿蝇复眼的 SF系统也有 相应的仿池细胞来提供调度 ,其调度能与 LF系统 中的仿池细胞类似. 仿蝇复眼遥感系统中的 LF系统和 SF系统协 同监测 ,既可以整体上获取相应的环境专题信息 ,也 可以对局部区域获取相应的环境专题信息 ,然后再 采用分类前变化信息提取法对监测区域的水、气体 的组分浓度等进行变化监测. 与此同时 ,在积累多时 相遥感监测结果的基础上 ,再对监测区域的组分变 异特征进行分析. 其中 LF系统、SF系统的数据处理 过程由池细胞来加以管理和控制 ,以协调 LF、SF系 统的输出. LF系统算法流程为 1)针对不同的传感器平台 ,进行虚拟复眼的设 计 ,复眼数目由遥感平台、地面传感器的数目确定. 2)不失一般性 ,设仿生复眼信息融合系统共有 n个虚拟遥感复眼 , 1个虚拟地面传感器复眼. 3) LF系统监测的输出共包含 m个环境专题信息. 4)设第 i个虚拟遥感复眼共有 Ei 个虚拟小眼 , 对应的图像数据为 I( Ei ). 则第 i个虚拟遥感复眼的 环境专题信息为 wj = f ( I ( Ei ) , g ) , 1 ≤ i ≤ n, 1≤j≤m ,式中 f表示采用的环境专题信息的反演函 数 , wj表示 LF系统输出的环境专题信息 , g表示与 I( Ei )同期的虚拟地面监测复眼数据. 5)针对 n个 LF系统的监测结果,进行分析比较. 6)在实现 LF系统监测时 , 启动“仿池细胞系 统 ”进’ 行 LF系统监测的管理与调度;如果所有虚拟 复眼数据缺失 ,启动预警;如果有某一虚拟复眼数据 缺失 ,可调用其他虚拟复眼数据来进行补充监测. SF系统算法流程为 1)选择虚拟复眼图像数据 I( Ei )以及虚拟地面 传感器复眼数据; 2)依据 LF系统的监测结果 wi ,选择相应的图 像分割算法 ,提取所研究环境的感兴趣区域 Si ; 3)融合各虚拟复眼 Si 的监测信息; 4)在实现 SF系统监测时 , 启动“仿池细胞系 统 ”进行 SF系统监测的管理与调度. 3. 3. 2 LF和 SF系统仿真实验及分析 以 TERRA卫星和 Landsat卫星组成的仿蝇复眼 信息融合系统为例来仿真 LF、SF系统的算法. 该系统 共有 2个虚拟复眼. TERRA卫星的 MOD IS数据以及 Landsat卫星的 TM数据来完成 LF、SF系统监测 ,监 测区域为太湖 ,监测的组分为叶绿素浓度分布. 图 4是由 TERRA 卫星 (提供 MOD IS数据 )和 Landsat卫星 (提供 TM数据 )组成的 LF、SF系统对 太湖水体叶绿素浓度分布监测结果. MOD IS遥感数据获取的时间为 2003年 10月 27日 ,选用的波段为 1~2波段 ,其空间分辨率为 250 m, 211波段组合的数据见图 4 ( a)所示. 使用 1 波段和 2波段的反射率 ,建立相关模型 ,得到 LF系 统的监测结果 (叶绿素浓度分布 ) ,如图 4 ( b)所示. TM数据的获取时间为 2003年 10月 28日 ,所使用 的遥感波段为 1~4波段 ,空间分辨率为 30 m, 432 波段组合的数据见图 4 ( c)所示. 使用波段 1~4的 反射率 ,建立回归模型 ,得到 LF系统的监测结果 (叶绿素浓度分布 )如图 4 ( d)所示. 图 4 中 , (浅 ) 黑 色 表 示 叶 绿 素 浓 度 高 (≥155μg/L) , (浅 ) 灰 色表示叶 绿色浓度 较 高 (≥56μg/L) , 灰 白 色 表 示 叶 绿 素 浓 度 较 低 (≤56μg/L). SF系统监测仅选用一个虚拟复眼数 据 ,即采用和图 4 ( a)相同的数据源 ,选用太湖的梅 梁湾区作为感兴趣区域 ,在 ERDAS 9. 0遥感软件 中 ,采用图像分割方法将该区域提取出来 ,该区域的 叶绿素浓度分布见图 4 ( e)所示 (经过插值放大 ). ·332· 智 能 系 统 学 报 第 3卷