正在加载图片...
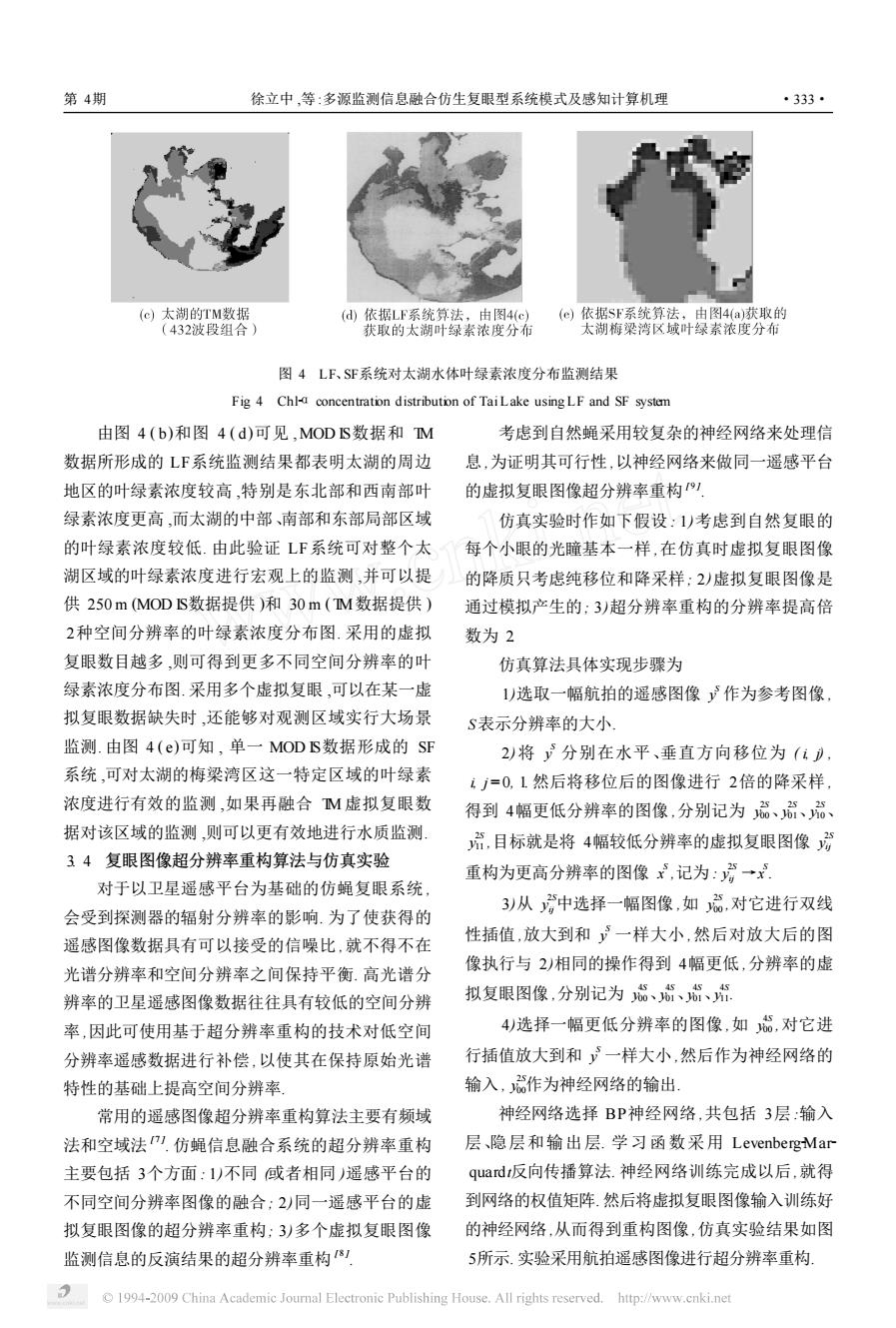
第4期 徐立中,等:多源监测信息融合仿生复眼型系统模式及感知计算机理 ·333 (c)太湖的TM数据 (d)依据LF系统算法,由图4(c) (e)依据SF系统算法,由图4(a)获取的 (432波段组合) 获取的太湖叶绿素浓度分府 太湖梅梁湾区域叶绿素浓度分布 图4LF、SF系统对太湖水体叶绿素浓度分布监测结果 Fig 4 Chla concentration distribution of TaiLake usingLF and SF system 由图4(b)和图4(d)可见,MODS数据和M 考虑到自然蝇采用较复杂的神经网络来处理信 数据所形成的LF系统监测结果都表明太湖的周边 息,为证明其可行性,以神经网络来做同一遥感平台 地区的叶绿素浓度较高,特别是东北部和西南部叶 的虚拟复眼图像超分辨率重构) 绿素浓度更高,而太湖的中部、南部和东部局部区域 仿真实验时作如下假设:1)考虑到自然复眼的 的叶绿素浓度较低.由此验证LF系统可对整个太 每个小眼的光瞳基本一样,在仿真时虚拟复眼图像 湖区域的叶绿素浓度进行宏观上的监测,并可以提 的降质只考虑纯移位和降采样:2)虚拟复眼图像是 供250mMOD1S数据提供)和30m(M数据提供) 通过模拟产生的:3)超分辨率重构的分辨率提高倍 2种空间分辨率的叶绿素浓度分布图.采用的虚拟 数为2 复眼数目越多,则可得到更多不同空间分辨率的叶 仿真算法具体实现步骤为 绿素浓度分布图.采用多个虚拟复眼,可以在某一虚 )选取一幅航拍的遥感图像,y作为参考图像 拟复眼数据缺失时,还能够对观测区域实行大场景 S表示分辨率的大小 监测.由图4(e)可知,单一MODS数据形成的SF 2将y分别在水平、垂直方向移位为(1 系统,可对太湖的梅梁湾区这一特定区域的叶绿素 i=0,1然后将移位后的图像进行2倍的降采样 浓度进行有效的监测,如果再融合M虚拟复眼数 得到4幅更低分辨率的图像,分别记为品、、品 据对该区域的监测,则可以更有效地进行水质监测 ,目标就是将4幅较低分辨率的虚拟复眼图像 34复眼图像超分辨率重构算法与仿真实验 重构为更高分辨率的图像x,记为:→x 对于以卫星遥感平台为基础的仿蝇复眼系统, 3)从中选择一幅图像,如,对它进行双线 会受到探测器的辐射分辨率的影响.为了使获得的 性插值,放大到和)一样大小,然后对放大后的图 遥感图像数据具有可以接受的信噪比,就不得不在 像执行与2)相同的操作得到4幅更低,分辨率的虚 光谱分辨率和空间分辨率之间保持平衡.高光谱分 辨率的卫星遥感图像数据往往具有较低的空间分辨 拟复眼图像,分别记为8、、、州 率,因此可使用基于超分辨率重构的技术对低空间 4)选择一幅更低分辨率的图像,如,对它进 分辨率遥感数据进行补偿,以使其在保持原始光谱 行插值放大到和一样大小,然后作为神经网络的 特性的基础上提高空间分辨率 输入,作为神经网络的输出。 常用的遥感图像超分辨率重构算法主要有频域 神经网络选择BP神经网络,共包括3层:输入 法和空域法?仿蝇信息融合系统的超分辨率重构 层、隐层和输出层.学习函数采用LevenbergMar 主要包括3个方面:1)不同或者相同)遥感平台的 quard反向传播算法.神经网络训练完成以后,就得 不同空间分辨率图像的融合;2同一遥感平台的虚 到网络的权值矩阵.然后将虚拟复眼图像输入训练好 拟复眼图像的超分辨率重构:3)多个虚拟复眼图像 的神经网络,从而得到重构图像,仿真实验结果如图 监测信息的反演结果的超分辨率重构 5所示.实验采用航拍遥感图像进行超分辨率重构, 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net图 4 LF、SF系统对太湖水体叶绿素浓度分布监测结果 Fig. 4 Chl2α concentration distribution of Tai Lake using LF and SF system 由图 4 ( b)和图 4 ( d)可见 ,MOD IS数据和 TM 数据所形成的 LF系统监测结果都表明太湖的周边 地区的叶绿素浓度较高 ,特别是东北部和西南部叶 绿素浓度更高 ,而太湖的中部、南部和东部局部区域 的叶绿素浓度较低. 由此验证 LF系统可对整个太 湖区域的叶绿素浓度进行宏观上的监测 ,并可以提 供 250 m (MOD IS数据提供 )和 30 m (TM数据提供 ) 2种空间分辨率的叶绿素浓度分布图. 采用的虚拟 复眼数目越多 ,则可得到更多不同空间分辨率的叶 绿素浓度分布图. 采用多个虚拟复眼 ,可以在某一虚 拟复眼数据缺失时 ,还能够对观测区域实行大场景 监测. 由图 4 ( e)可知 , 单一 MOD IS数据形成的 SF 系统 ,可对太湖的梅梁湾区这一特定区域的叶绿素 浓度进行有效的监测 ,如果再融合 TM 虚拟复眼数 据对该区域的监测 ,则可以更有效地进行水质监测. 3. 4 复眼图像超分辨率重构算法与仿真实验 对于以卫星遥感平台为基础的仿蝇复眼系统 , 会受到探测器的辐射分辨率的影响. 为了使获得的 遥感图像数据具有可以接受的信噪比 ,就不得不在 光谱分辨率和空间分辨率之间保持平衡. 高光谱分 辨率的卫星遥感图像数据往往具有较低的空间分辨 率 ,因此可使用基于超分辨率重构的技术对低空间 分辨率遥感数据进行补偿 ,以使其在保持原始光谱 特性的基础上提高空间分辨率. 常用的遥感图像超分辨率重构算法主要有频域 法和空域法 [ 7 ] . 仿蝇信息融合系统的超分辨率重构 主要包括 3个方面 : 1)不同 (或者相同 )遥感平台的 不同空间分辨率图像的融合; 2)同一遥感平台的虚 拟复眼图像的超分辨率重构; 3)多个虚拟复眼图像 监测信息的反演结果的超分辨率重构 [ 8 ] . 考虑到自然蝇采用较复杂的神经网络来处理信 息 ,为证明其可行性 ,以神经网络来做同一遥感平台 的虚拟复眼图像超分辨率重构 [ 9 ] . 仿真实验时作如下假设 : 1)考虑到自然复眼的 每个小眼的光瞳基本一样 ,在仿真时虚拟复眼图像 的降质只考虑纯移位和降采样; 2)虚拟复眼图像是 通过模拟产生的; 3)超分辨率重构的分辨率提高倍 数为 2. 仿真算法具体实现步骤为 1)选取一幅航拍的遥感图像 y S 作为参考图像 , S表示分辨率的大小. 2)将 y S 分别在水平、垂直方向移位为 ( i, j) , i, j = 0, 1. 然后将移位后的图像进行 2倍的降采样 , 得到 4幅更低分辨率的图像 ,分别记为 y 2S 00、y 2S 01、y 2S 10、 y 2S 11 ,目标就是将 4幅较低分辨率的虚拟复眼图像 y 2S ij 重构为更高分辨率的图像 x S ,记为 : y 2S ij →x S . 3)从 y 2S ij中选择一幅图像 ,如 y 2S 00 ,对它进行双线 性插值 ,放大到和 y S 一样大小 ,然后对放大后的图 像执行与 2)相同的操作得到 4幅更低 ,分辨率的虚 拟复眼图像 ,分别记为 y 4S 00、y 4S 01、y 4S 01、y 4S 11 . 4)选择一幅更低分辨率的图像 ,如 y 4S 00 ,对它进 行插值放大到和 y S 一样大小 ,然后作为神经网络的 输入 , y 2S 00作为神经网络的输出. 神经网络选择 BP神经网络,共包括 3层:输入 层、隐层和输出层. 学习函数采用 Levenberg2Mar2 quardt反向传播算法. 神经网络训练完成以后,就得 到网络的权值矩阵. 然后将虚拟复眼图像输入训练好 的神经网络,从而得到重构图像 ,仿真实验结果如图 5所示. 实验采用航拍遥感图像进行超分辨率重构. 第 4期 徐立中 ,等 :多源监测信息融合仿生复眼型系统模式及感知计算机理 ·333·