正在加载图片...
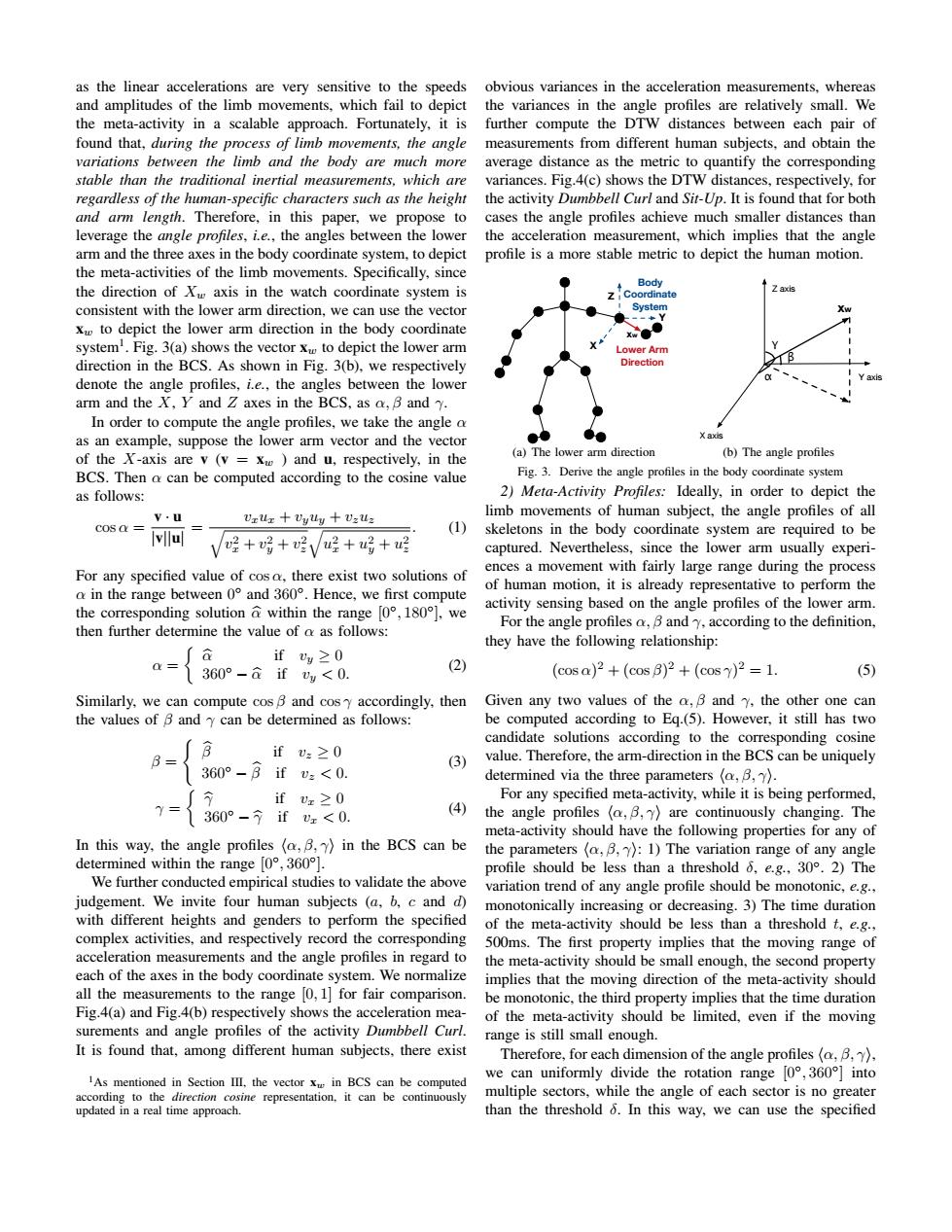
as the linear accelerations are very sensitive to the speeds obvious variances in the acceleration measurements,whereas and amplitudes of the limb movements,which fail to depict the variances in the angle profiles are relatively small.We the meta-activity in a scalable approach.Fortunately,it is further compute the DTW distances between each pair of found that,during the process of limb movements,the angle measurements from different human subjects,and obtain the variations between the limb and the body are much more average distance as the metric to quantify the corresponding stable than the traditional inertial measurements,which are variances.Fig.4(c)shows the DTW distances,respectively,for regardless of the human-specific characters such as the height the activity Dumbbell Curl and Sit-Up.It is found that for both and arm length.Therefore,in this paper,we propose to cases the angle profiles achieve much smaller distances than leverage the angle profiles,i.e.,the angles between the lower the acceleration measurement,which implies that the angle arm and the three axes in the body coordinate system,to depict profile is a more stable metric to depict the human motion. the meta-activities of the limb movements.Specifically,since Body the direction of X axis in the watch coordinate system is zCoordinate consistent with the lower arm direction,we can use the vector System X x to depict the lower arm direction in the body coordinate a●● system'.Fig.3(a)shows the vector x to depict the lower arm Lower Arm direction in the BCS.As shown in Fig.3(b),we respectively Direction denote the angle profiles,i.e.,the angles between the lower arm and the X,Y and Z axes in the BCS,as a,B and In order to compute the angle profiles,we take the angle a as an example,suppose the lower arm vector and the vector X axis of the X-axis are v(v=x)and u,respectively,in the (a)The lower arm direction (b)The angle profiles BCS.Then a can be computed according to the cosine value Fig.3.Derive the angle profiles in the body coordinate system as follows: 2)Meta-Activity Profiles:Ideally,in order to depict the V·u Uruz Vyuy Vzuz limb movements of human subject,the angle profiles of all cos a (1) skeletons in the body coordinate system are required to be √喔+哈+吃V+吃+喔 captured.Nevertheless,since the lower arm usually experi- For any specified value of cos a,there exist two solutions of ences a movement with fairly large range during the process a in the range between 0 and 360.Hence,we first compute of human motion,it is already representative to perform the the corresponding solution a within the range [0,180],we activity sensing based on the angle profiles of the lower arm. For the angle profiles a.B and y,according to the definition. then further determine the value of o as follows: they have the following relationship: ifvy≥0 a= 360°-a if vy<0. (2) (cosa)2+(cosB)2+(cosy)2=1 (5) Similarly,we can compute cos B and cosy accordingly,then Given any two values of the a,B and y,the other one can the values of B and y can be determined as follows: be computed according to Eg.(5).However,it still has two candidate solutions according to the corresponding cosine ifv2≥0 (3) value.Therefore,the arm-direction in the BCS can be uniquely 360°-ifv2<0. determined via the three parameters (o,B,) ifvz≥0 For any specified meta-activity,while it is being performed, 360°-ifvx<0. (4) the angle profiles (a,B,are continuously changing.The meta-activity should have the following properties for any of In this way,the angle profiles (o,B,in the BCS can be the parameters (o,B,):1)The variation range of any angle determined within the range[0°,36o]. profile should be less than a threshold 6,e.g.,30.2)The We further conducted empirical studies to validate the above variation trend of any angle profile should be monotonic,e.g., judgement.We invite four human subjects (a,b,c and d) monotonically increasing or decreasing.3)The time duration with different heights and genders to perform the specified of the meta-activity should be less than a threshold t,e.g.. complex activities,and respectively record the corresponding 500ms.The first property implies that the moving range of acceleration measurements and the angle profiles in regard to the meta-activity should be small enough,the second property each of the axes in the body coordinate system.We normalize implies that the moving direction of the meta-activity should all the measurements to the range [0,1]for fair comparison. be monotonic,the third property implies that the time duration Fig.4(a)and Fig.4(b)respectively shows the acceleration mea- of the meta-activity should be limited,even if the moving surements and angle profiles of the activity Dumbbell Curl. range is still small enough. It is found that,among different human subjects,there exist Therefore,for each dimension of the angle profiles (o,B,Y), As mentioned in Section III,the vector x in BCS can be computed we can uniformly divide the rotation range [0,360]into according to the direction cosine representation,it can be continuously multiple sectors,while the angle of each sector is no greater updated in a real time approach. than the threshold 6.In this way,we can use the specifiedas the linear accelerations are very sensitive to the speeds and amplitudes of the limb movements, which fail to depict the meta-activity in a scalable approach. Fortunately, it is found that, during the process of limb movements, the angle variations between the limb and the body are much more stable than the traditional inertial measurements, which are regardless of the human-specific characters such as the height and arm length. Therefore, in this paper, we propose to leverage the angle profiles, i.e., the angles between the lower arm and the three axes in the body coordinate system, to depict the meta-activities of the limb movements. Specifically, since the direction of Xw axis in the watch coordinate system is consistent with the lower arm direction, we can use the vector xw to depict the lower arm direction in the body coordinate system1 . Fig. 3(a) shows the vector xw to depict the lower arm direction in the BCS. As shown in Fig. 3(b), we respectively denote the angle profiles, i.e., the angles between the lower arm and the X, Y and Z axes in the BCS, as α, β and γ. In order to compute the angle profiles, we take the angle α as an example, suppose the lower arm vector and the vector of the X-axis are v (v = xw ) and u, respectively, in the BCS. Then α can be computed according to the cosine value as follows: cos α = v · u |v||u| = q vxux + vyuy + vzuz v 2 x + v 2 y + v 2 z q u 2 x + u 2 y + u 2 z . (1) For any specified value of cos α, there exist two solutions of α in the range between 0 ◦ and 360◦ . Hence, we first compute the corresponding solution αb within the range [0◦ , 180◦ ], we then further determine the value of α as follows: α = αb if vy ≥ 0 360◦ − αb if vy < 0. (2) Similarly, we can compute cos β and cos γ accordingly, then the values of β and γ can be determined as follows: β = ( βb if vz ≥ 0 360◦ − βb if vz < 0. (3) γ = γb if vx ≥ 0 360◦ − γb if vx < 0. (4) In this way, the angle profiles hα, β, γi in the BCS can be determined within the range [0◦ , 360◦ ]. We further conducted empirical studies to validate the above judgement. We invite four human subjects (a, b, c and d) with different heights and genders to perform the specified complex activities, and respectively record the corresponding acceleration measurements and the angle profiles in regard to each of the axes in the body coordinate system. We normalize all the measurements to the range [0, 1] for fair comparison. Fig.4(a) and Fig.4(b) respectively shows the acceleration measurements and angle profiles of the activity Dumbbell Curl. It is found that, among different human subjects, there exist 1As mentioned in Section III, the vector xw in BCS can be computed according to the direction cosine representation, it can be continuously updated in a real time approach. obvious variances in the acceleration measurements, whereas the variances in the angle profiles are relatively small. We further compute the DTW distances between each pair of measurements from different human subjects, and obtain the average distance as the metric to quantify the corresponding variances. Fig.4(c) shows the DTW distances, respectively, for the activity Dumbbell Curl and Sit-Up. It is found that for both cases the angle profiles achieve much smaller distances than the acceleration measurement, which implies that the angle profile is a more stable metric to depict the human motion. Z X Y Body Coordinate System Lower Arm Direction xw (a) The lower arm direction Z axis X axis Y axis xw α β γ (b) The angle profiles Fig. 3. Derive the angle profiles in the body coordinate system 2) Meta-Activity Profiles: Ideally, in order to depict the limb movements of human subject, the angle profiles of all skeletons in the body coordinate system are required to be captured. Nevertheless, since the lower arm usually experiences a movement with fairly large range during the process of human motion, it is already representative to perform the activity sensing based on the angle profiles of the lower arm. For the angle profiles α, β and γ, according to the definition, they have the following relationship: (cos α) 2 + (cos β) 2 + (cos γ) 2 = 1. (5) Given any two values of the α, β and γ, the other one can be computed according to Eq.(5). However, it still has two candidate solutions according to the corresponding cosine value. Therefore, the arm-direction in the BCS can be uniquely determined via the three parameters hα, β, γi. For any specified meta-activity, while it is being performed, the angle profiles hα, β, γi are continuously changing. The meta-activity should have the following properties for any of the parameters hα, β, γi: 1) The variation range of any angle profile should be less than a threshold δ, e.g., 30◦ . 2) The variation trend of any angle profile should be monotonic, e.g., monotonically increasing or decreasing. 3) The time duration of the meta-activity should be less than a threshold t, e.g., 500ms. The first property implies that the moving range of the meta-activity should be small enough, the second property implies that the moving direction of the meta-activity should be monotonic, the third property implies that the time duration of the meta-activity should be limited, even if the moving range is still small enough. Therefore, for each dimension of the angle profiles hα, β, γi, we can uniformly divide the rotation range [0◦ , 360◦ ] into multiple sectors, while the angle of each sector is no greater than the threshold δ. In this way, we can use the specified