正在加载图片...
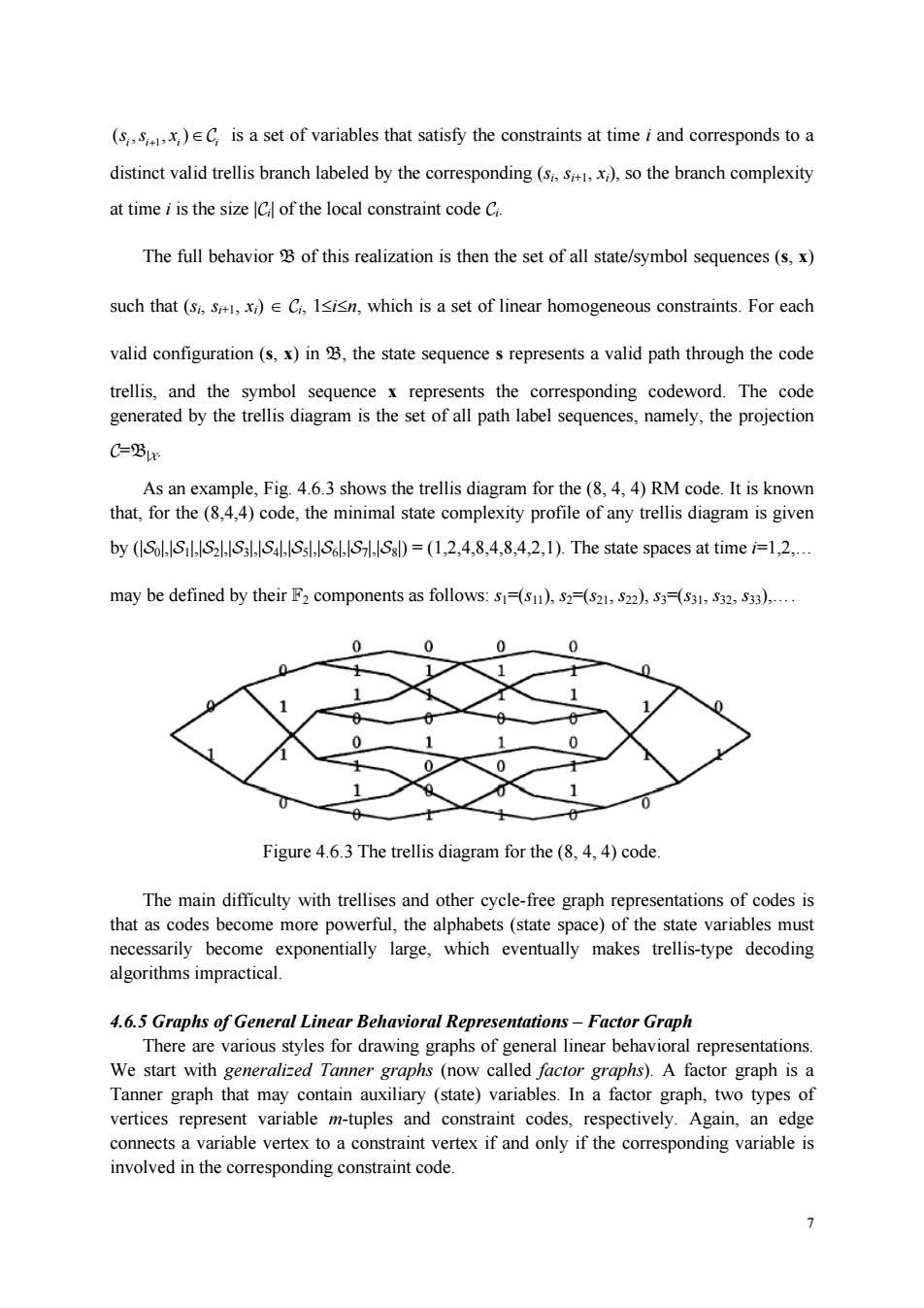
(s,x)EC is a set of variables that satisfy the constraints at time i and corresponds to a distinct valid trellis branch labeled by the corresponding(s),so the branch complexity at time i is the size Cof the local constraint code C. The full behavior of this realization is then the set of all state/symbol sequences(s,x) such that ()C,1sisn,which is a set of linear homogeneous constraints.For each valid configuration (s,x)in the state sequence s represents a valid path through the code trellis.and the symbol sequence x represents the corresponding codeword.The code generated by the trellis diagram is the set of all path label sequences,namely,the projection C-Bur As an example,Fig.4.6.3 shows the trellis diagram for the(8,4,4)RM code.It is known that,for the(84,4)code,the minimal state complexity profile of any trellis diagram is given by (o)=(1.2.4.8.4.8.4.2,1).The state spaces at time =1.2. may be defined by their F2 components as follows:s=(s),5=(s21,2),(,3). 0 0 0 Figure 4.6.3 The trellis diagram for the(8,4,4)code The main difficulty with trellises and other cycle-free graph representations of codes is as codes become more powerf the alphabets (state space)of the state variab necessarily bec which ever makes trellis-type decoding algorithms impractical. 4.6.5 Graphs of General Linear Behavioral Representations-Factor Graph tare various styles for drawing graphs of general linear behavioral representations. We start with ralized Tanner ow called factor graphs).A fact graph is a Tanner grah that may contain auxiliary (state)variables.In a factor aph.two types of vertices represent variable m-tuples and constraint codes,respectively.Again,an edge connects a variable vertex to a constraint vertex if and only if the corresponding variable is involved in the corresponding constraint code. 7 1 (, , ) ii i i ss x + ∈C is a set of variables that satisfy the constraints at time i and corresponds to a distinct valid trellis branch labeled by the corresponding (si, si+1, xi), so the branch complexity at time i is the size |Ci| of the local constraint code Ci. The full behavior B of this realization is then the set of all state/symbol sequences (s, x) such that (si, si+1, xi) ∈ Ci, 1≤i≤n, which is a set of linear homogeneous constraints. For each valid configuration (s, x) in B, the state sequence s represents a valid path through the code trellis, and the symbol sequence x represents the corresponding codeword. The code generated by the trellis diagram is the set of all path label sequences, namely, the projection C=B|X. As an example, Fig. 4.6.3 shows the trellis diagram for the (8, 4, 4) RM code. It is known that, for the (8,4,4) code, the minimal state complexity profile of any trellis diagram is given by (|S0|,|S1|,|S2|,|S3|,|S4|,|S5|,|S6|,|S7|,|S8|) = (1,2,4,8,4,8,4,2,1). The state spaces at time i=1,2,. may be defined by their F2 components as follows: s1=(s11), s2=(s21, s22), s3=(s31, s32, s33),. Figure 4.6.3 The trellis diagram for the (8, 4, 4) code. The main difficulty with trellises and other cycle-free graph representations of codes is that as codes become more powerful, the alphabets (state space) of the state variables must necessarily become exponentially large, which eventually makes trellis-type decoding algorithms impractical. 4.6.5 Graphs of General Linear Behavioral Representations – Factor Graph There are various styles for drawing graphs of general linear behavioral representations. We start with generalized Tanner graphs (now called factor graphs). A factor graph is a Tanner graph that may contain auxiliary (state) variables. In a factor graph, two types of vertices represent variable m-tuples and constraint codes, respectively. Again, an edge connects a variable vertex to a constraint vertex if and only if the corresponding variable is involved in the corresponding constraint code