正在加载图片...
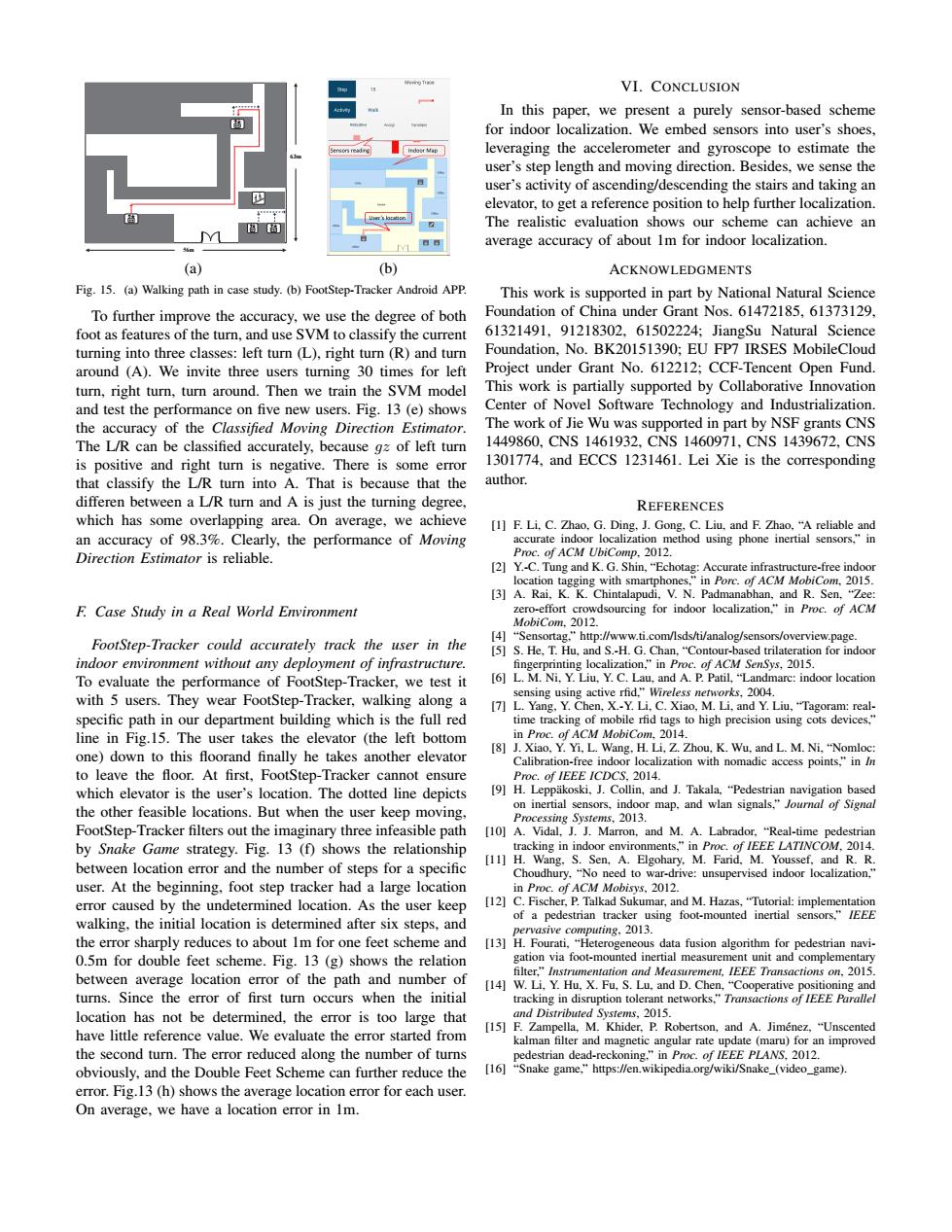
VI.CONCLUSION In this paper,we present a purely sensor-based scheme for indoor localization.We embed sensors into user's shoes, leveraging the accelerometer and gyroscope to estimate the user's step length and moving direction.Besides,we sense the user's activity of ascending/descending the stairs and taking an elevator,to get a reference position to help further localization. The realistic evaluation shows our scheme can achieve an average accuracy of about Im for indoor localization. (a) (b) ACKNOWLEDGMENTS Fig.15.(a)Walking path in case study.(b)FootStep-Tracker Android APP. This work is supported in part by National Natural Science To further improve the accuracy,we use the degree of both Foundation of China under Grant Nos.61472185,61373129. foot as features of the turn,and use SVM to classify the current 61321491,91218302,61502224;JiangSu Natural Science turning into three classes:left turn (L),right turn (R)and turn Foundation.No.BK20151390:EU FP7 IRSES MobileCloud around (A).We invite three users turning 30 times for left Project under Grant No.612212;CCF-Tencent Open Fund. turn,right turn,turn around.Then we train the SVM model This work is partially supported by Collaborative Innovation and test the performance on five new users.Fig.13 (e)shows Center of Novel Software Technology and Industrialization. the accuracy of the Classified Moving Direction Estimator. The work of Jie Wu was supported in part by NSF grants CNS The L/R can be classified accurately,because gz of left turn 1449860,CNS1461932,CNS1460971,CNS1439672,CNS is positive and right turn is negative.There is some error 1301774,and ECCS 1231461.Lei Xie is the corresponding that classify the L/R turn into A.That is because that the author. differen between a L/R turn and A is just the turning degree, REFERENCES which has some overlapping area.On average,we achieve [1]F.Li,C.Zhao.G.Ding,J.Gong,C.Liu,and F.Zhao."A reliable and an accuracy of 98.3%.Clearly,the performance of Moving accurate indoor localization method using phone inertial sensors,"in Direction Estimator is reliable. Proc.of ACM UbiComp,2012. [2]Y.-C.Tung and K.G.Shin,"Echotag:Accurate infrastructure-free indoor location tagging with smartphones."in Porc.of ACM MobiCom.2015. [3]A.Rai,K.K.Chintalapudi,V.N.Padmanabhan,and R.Sen,"Zee: F.Case Study in a Real World Environment zero-effort crowdsourcing for indoor localization,"in Proc.of ACM MobiCom,2012. [4]"Sensortag,"http://www.ti.com/lsds/ti/analog/sensors/overview.page. FootStep-Tracker could accurately track the user in the [5]S.He,T.Hu,and S.-H.G.Chan,"Contour-based trilateration for indoor indoor environment without any deployment of infrastructure. fingerprinting localization."in Proc.of ACM SenSys,2015. To evaluate the performance of FootStep-Tracker,we test it [6]L.M.Ni,Y.Liu,Y.C.Lau,and A.P.Patil,"Landmarc:indoor location with 5 users.They wear FootStep-Tracker,walking along a sensing using active rfid,"Wireless networks,2004. [7]L.Yang,Y.Chen,X.-Y.Li,C.Xiao,M.Li,and Y.Liu,"Tagoram:real- specific path in our department building which is the full red time tracking of mobile rfid tags to high precision using cots devices," line in Fig.15.The user takes the elevator (the left bottom in Proc.of ACM MobiCom,2014. [8]J.Xiao,Y.Yi,L.Wang,H.Li,Z.Zhou,K.Wu,and L.M.Ni,"Nomloc: one)down to this floorand finally he takes another elevator Calibration-free indoor localization with nomadic access points,"in In to leave the floor.At first,FootStep-Tracker cannot ensure Proc.of IEEE ICDCS,2014. which elevator is the user's location.The dotted line depicts [9]H.Leppakoski,J.Collin,and J.Takala,"Pedestrian navigation based the other feasible locations.But when the user keep moving, on inertial sensors,indoor map.and wlan signals."Journal of Signal Processing Systems.2013. FootStep-Tracker filters out the imaginary three infeasible path [10]A.Vidal,J.J.Marron,and M.A.Labrador,"Real-time pedestrian by Snake Game strategy.Fig.13 (f)shows the relationship tracking in indoor environments,"in Proc.of IEEE LATINCOM,2014 between location error and the number of steps for a specific [11]H.Wang.S.Sen,A.Elgohary,M.Farid,M.Youssef,and R.R Choudhury,"No need to war-drive:unsupervised indoor localization," user.At the beginning,foot step tracker had a large location in Proc.of ACM Mobisys,2012. error caused by the undetermined location.As the user keep [12]C.Fischer,P.Talkad Sukumar,and M.Hazas,"Tutorial:implementation walking,the initial location is determined after six steps,and of a pedestrian tracker using foot-mounted inertial sensors,"IEEE pervasive computing,2013. the error sharply reduces to about Im for one feet scheme and [13]H.Fourati,"Heterogeneous data fusion algorithm for pedestrian navi- 0.5m for double feet scheme.Fig.13 (g)shows the relation gation via foot-mounted inertial measurement unit and complementary filter,"Instrumentation and Measurement,IEEE Transactions on,2015. between average location error of the path and number of [14]W.Li,Y.Hu,X.Fu,S.Lu,and D.Chen,"Cooperative positioning and turns.Since the error of first turn occurs when the initial tracking in disruption tolerant networks,"Transactions of IEEE Parallel location has not be determined,the error is too large that and Distributed Systems,2015. [15]F.Zampella.M.Khider.P.Robertson,and A.Jimenez,"Unscented have little reference value.We evaluate the error started from kalman filter and magnetic angular rate update (maru)for an improved the second turn.The error reduced along the number of turns pedestrian dead-reckoning,"in Proc.of IEEE PLANS,2012. obviously,and the Double Feet Scheme can further reduce the [16]"Snake game,"https://en.wikipedia.org/wiki/Snake_(video_game). error.Fig.13(h)shows the average location error for each user. On average,we have a location error in Im.56m 63m (a) (b) Fig. 15. (a) Walking path in case study. (b) FootStep-Tracker Android APP. To further improve the accuracy, we use the degree of both foot as features of the turn, and use SVM to classify the current turning into three classes: left turn (L), right turn (R) and turn around (A). We invite three users turning 30 times for left turn, right turn, turn around. Then we train the SVM model and test the performance on five new users. Fig. 13 (e) shows the accuracy of the Classified Moving Direction Estimator. The L/R can be classified accurately, because gz of left turn is positive and right turn is negative. There is some error that classify the L/R turn into A. That is because that the differen between a L/R turn and A is just the turning degree, which has some overlapping area. On average, we achieve an accuracy of 98.3%. Clearly, the performance of Moving Direction Estimator is reliable. F. Case Study in a Real World Environment FootStep-Tracker could accurately track the user in the indoor environment without any deployment of infrastructure. To evaluate the performance of FootStep-Tracker, we test it with 5 users. They wear FootStep-Tracker, walking along a specific path in our department building which is the full red line in Fig.15. The user takes the elevator (the left bottom one) down to this floorand finally he takes another elevator to leave the floor. At first, FootStep-Tracker cannot ensure which elevator is the user’s location. The dotted line depicts the other feasible locations. But when the user keep moving, FootStep-Tracker filters out the imaginary three infeasible path by Snake Game strategy. Fig. 13 (f) shows the relationship between location error and the number of steps for a specific user. At the beginning, foot step tracker had a large location error caused by the undetermined location. As the user keep walking, the initial location is determined after six steps, and the error sharply reduces to about 1m for one feet scheme and 0.5m for double feet scheme. Fig. 13 (g) shows the relation between average location error of the path and number of turns. Since the error of first turn occurs when the initial location has not be determined, the error is too large that have little reference value. We evaluate the error started from the second turn. The error reduced along the number of turns obviously, and the Double Feet Scheme can further reduce the error. Fig.13 (h) shows the average location error for each user. On average, we have a location error in 1m. VI. CONCLUSION In this paper, we present a purely sensor-based scheme for indoor localization. We embed sensors into user’s shoes, leveraging the accelerometer and gyroscope to estimate the user’s step length and moving direction. Besides, we sense the user’s activity of ascending/descending the stairs and taking an elevator, to get a reference position to help further localization. The realistic evaluation shows our scheme can achieve an average accuracy of about 1m for indoor localization. ACKNOWLEDGMENTS This work is supported in part by National Natural Science Foundation of China under Grant Nos. 61472185, 61373129, 61321491, 91218302, 61502224; JiangSu Natural Science Foundation, No. BK20151390; EU FP7 IRSES MobileCloud Project under Grant No. 612212; CCF-Tencent Open Fund. This work is partially supported by Collaborative Innovation Center of Novel Software Technology and Industrialization. The work of Jie Wu was supported in part by NSF grants CNS 1449860, CNS 1461932, CNS 1460971, CNS 1439672, CNS 1301774, and ECCS 1231461. Lei Xie is the corresponding author. REFERENCES [1] F. Li, C. Zhao, G. Ding, J. Gong, C. Liu, and F. Zhao, “A reliable and accurate indoor localization method using phone inertial sensors,” in Proc. of ACM UbiComp, 2012. [2] Y.-C. Tung and K. G. Shin, “Echotag: Accurate infrastructure-free indoor location tagging with smartphones,” in Porc. of ACM MobiCom, 2015. [3] A. Rai, K. K. Chintalapudi, V. N. Padmanabhan, and R. Sen, “Zee: zero-effort crowdsourcing for indoor localization,” in Proc. of ACM MobiCom, 2012. [4] “Sensortag,” http://www.ti.com/lsds/ti/analog/sensors/overview.page. [5] S. He, T. Hu, and S.-H. G. Chan, “Contour-based trilateration for indoor fingerprinting localization,” in Proc. of ACM SenSys, 2015. [6] L. M. Ni, Y. Liu, Y. C. Lau, and A. P. Patil, “Landmarc: indoor location sensing using active rfid,” Wireless networks, 2004. [7] L. Yang, Y. Chen, X.-Y. Li, C. Xiao, M. Li, and Y. Liu, “Tagoram: realtime tracking of mobile rfid tags to high precision using cots devices,” in Proc. of ACM MobiCom, 2014. [8] J. Xiao, Y. Yi, L. Wang, H. Li, Z. Zhou, K. Wu, and L. M. Ni, “Nomloc: Calibration-free indoor localization with nomadic access points,” in In Proc. of IEEE ICDCS, 2014. [9] H. Leppakoski, J. Collin, and J. Takala, “Pedestrian navigation based ¨ on inertial sensors, indoor map, and wlan signals,” Journal of Signal Processing Systems, 2013. [10] A. Vidal, J. J. Marron, and M. A. Labrador, “Real-time pedestrian tracking in indoor environments,” in Proc. of IEEE LATINCOM, 2014. [11] H. Wang, S. Sen, A. Elgohary, M. Farid, M. Youssef, and R. R. Choudhury, “No need to war-drive: unsupervised indoor localization,” in Proc. of ACM Mobisys, 2012. [12] C. Fischer, P. Talkad Sukumar, and M. Hazas, “Tutorial: implementation of a pedestrian tracker using foot-mounted inertial sensors,” IEEE pervasive computing, 2013. [13] H. Fourati, “Heterogeneous data fusion algorithm for pedestrian navigation via foot-mounted inertial measurement unit and complementary filter,” Instrumentation and Measurement, IEEE Transactions on, 2015. [14] W. Li, Y. Hu, X. Fu, S. Lu, and D. Chen, “Cooperative positioning and tracking in disruption tolerant networks,” Transactions of IEEE Parallel and Distributed Systems, 2015. [15] F. Zampella, M. Khider, P. Robertson, and A. Jimenez, “Unscented ´ kalman filter and magnetic angular rate update (maru) for an improved pedestrian dead-reckoning,” in Proc. of IEEE PLANS, 2012. [16] “Snake game,” https://en.wikipedia.org/wiki/Snake (video game)