正在加载图片...
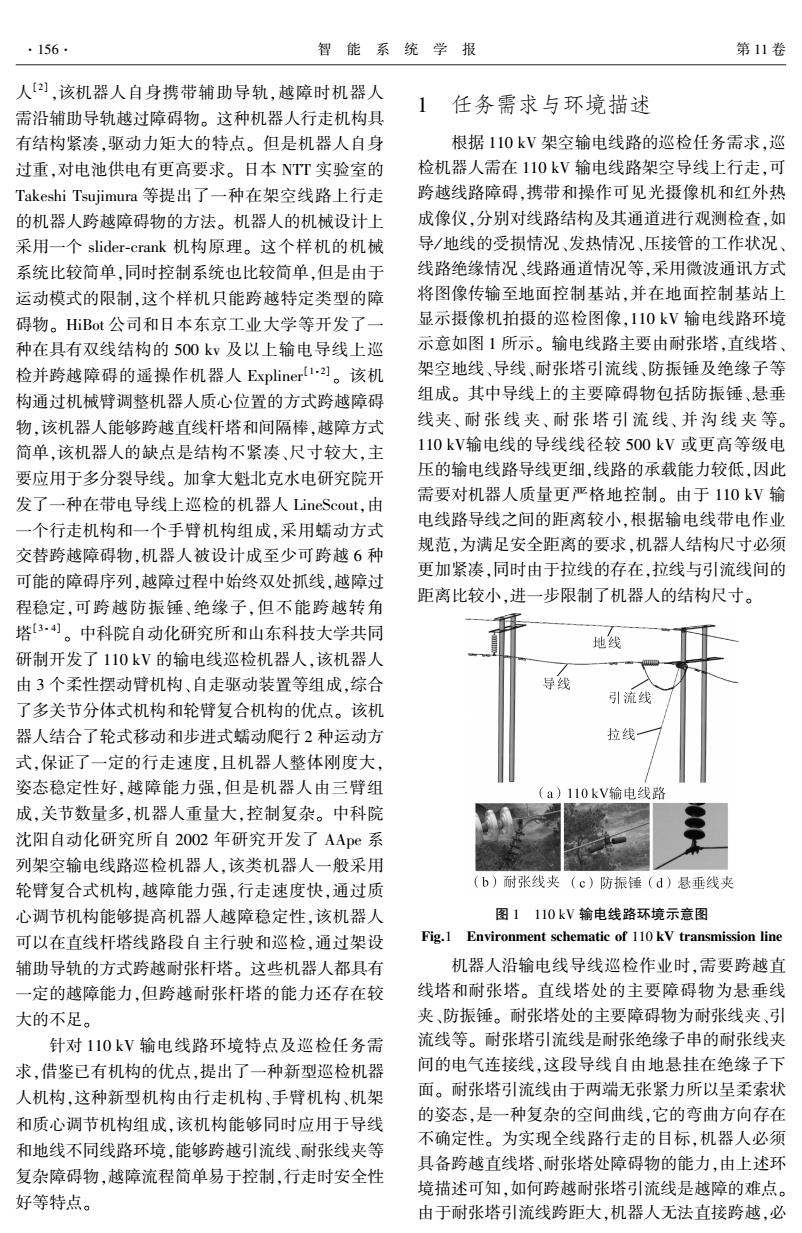
·156 智能系统学报 第11卷 人[],该机器人自身携带辅助导轨,越障时机器人 1 任务需求与环境描述 需沿辅助导轨越过障碍物。这种机器人行走机构具 有结构紧凑,驱动力矩大的特点。但是机器人自身 根据110kV架空输电线路的巡检任务需求,巡 过重,对电池供电有更高要求。日本NTT实验室的 检机器人需在110kV输电线路架空导线上行走,可 Takeshi Tsujimura等提出了一种在架空线路上行走 跨越线路障碍,携带和操作可见光摄像机和红外热 的机器人跨越障碍物的方法。机器人的机械设计上 成像仪,分别对线路结构及其通道进行观测检查,如 采用一个slider-crank机构原理。这个样机的机械 导/地线的受损情况、发热情况、压接管的工作状况、 系统比较简单,同时控制系统也比较简单,但是由于 线路绝缘情况、线路通道情况等,采用微波通讯方式 运动模式的限制,这个样机只能跨越特定类型的障 将图像传输至地面控制基站,并在地面控制基站上 碍物。HiBot公司和日本东京工业大学等开发了一 显示摄像机拍摄的巡检图像,110kV输电线路环境 种在具有双线结构的500kv及以上输电导线上巡 示意如图1所示。输电线路主要由耐张塔,直线塔、 检并跨越障得的遥操作机器人Expliner1)。该机 架空地线、导线、耐张塔引流线、防振锤及绝缘子等 构通过机械臂调整机器人质心位置的方式跨越障碍 组成。其中导线上的主要障碍物包括防振锤、悬垂 物,该机器人能够跨越直线杆塔和间隔棒,越障方式 线夹、耐张线夹、耐张塔引流线、并沟线夹等。 简单,该机器人的缺点是结构不紧凑、尺寸较大,主 110kV输电线的导线线径较500kV或更高等级电 要应用于多分裂导线。加拿大魁北克水电研究院开 压的输电线路导线更细,线路的承载能力较低,因此 发了一种在带电导线上巡检的机器人LineScout,由 需要对机器人质量更严格地控制。由于110kV输 一个行走机构和一个手臂机构组成,采用蠕动方式 电线路导线之间的距离较小,根据输电线带电作业 规范,为满足安全距离的要求,机器人结构尺寸必须 交替跨越障碍物,机器人被设计成至少可跨越6种 更加紧凑,同时由于拉线的存在,拉线与引流线间的 可能的障碍序列,越障过程中始终双处抓线,越障过 距离比较小,进一步限制了机器人的结构尺寸。 程稳定,可跨越防振锤、绝缘子,但不能跨越转角 塔34)。中科院自动化研究所和山东科技大学共同 地线 研制开发了110kV的输电线巡检机器人,该机器人 由3个柔性摆动臂机构、自走驱动装置等组成,综合 导线 引流线 了多关节分体式机构和轮臂复合机构的优点。该机 器人结合了轮式移动和步进式蠕动爬行2种运动方 拉线 式,保证了一定的行走速度,且机器人整体刚度大, 姿态稳定性好,越障能力强,但是机器人由三臂组 (a)110kV输电线路 成,关节数量多,机器人重量大,控制复杂。中科院 沈阳自动化研究所自2002年研究开发了AApe系 列架空输电线路巡检机器人,该类机器人一般采用 轮臂复合式机构,越障能力强,行走速度快,通过质 (b)耐张线夹(c)防振锤(d)悬垂线夹 心调节机构能够提高机器人越障稳定性,该机器人 图1110kV输电线路环境示意图 可以在直线杆塔线路段自主行驶和巡检,通过架设 Fig.1 Environment schematic of 110 kV transmission line 辅助导轨的方式跨越耐张杆塔。这些机器人都具有 机器人沿输电线导线巡检作业时,需要跨越直 一定的越障能力,但跨越耐张杆塔的能力还存在较 线塔和耐张塔。直线塔处的主要障碍物为悬垂线 大的不足。 夹、防振锤。耐张塔处的主要障碍物为耐张线夹、引 针对110kV输电线路环境特点及巡检任务需 流线等。耐张塔引流线是耐张绝缘子串的耐张线夹 求,借鉴已有机构的优点,提出了一种新型巡检机器 间的电气连接线,这段导线自由地悬挂在绝缘子下 人机构,这种新型机构由行走机构、手臂机构、机架 面。耐张塔引流线由于两端无张紧力所以呈柔索状 和质心调节机构组成,该机构能够同时应用于导线 的姿态,是一种复杂的空间曲线,它的弯曲方向存在 不确定性。为实现全线路行走的目标,机器人必须 和地线不同线路环境,能够跨越引流线、耐张线夹等 具备跨越直线塔、耐张塔处障碍物的能力,由上述环 复杂障碍物,越障流程简单易于控制,行走时安全性 境描述可知,如何跨越耐张塔引流线是越障的难点。 好等特点。 由于耐张塔引流线跨距大,机器人无法直接跨越,必人[2] ,该机器人自身携带辅助导轨,越障时机器人 需沿辅助导轨越过障碍物。 这种机器人行走机构具 有结构紧凑,驱动力矩大的特点。 但是机器人自身 过重,对电池供电有更高要求。 日本 NTT 实验室的 Takeshi Tsujimura 等提出了一种在架空线路上行走 的机器人跨越障碍物的方法。 机器人的机械设计上 采用一个 slider⁃crank 机构原理。 这个样机的机械 系统比较简单,同时控制系统也比较简单,但是由于 运动模式的限制,这个样机只能跨越特定类型的障 碍物。 HiBot 公司和日本东京工业大学等开发了一 种在具有双线结构的 500 kv 及以上输电导线上巡 检并跨越障碍的遥操作机器人 Expliner [1 ⁃ 2] 。 该机 构通过机械臂调整机器人质心位置的方式跨越障碍 物,该机器人能够跨越直线杆塔和间隔棒,越障方式 简单,该机器人的缺点是结构不紧凑、尺寸较大,主 要应用于多分裂导线。 加拿大魁北克水电研究院开 发了一种在带电导线上巡检的机器人 LineScout,由 一个行走机构和一个手臂机构组成,采用蠕动方式 交替跨越障碍物,机器人被设计成至少可跨越 6 种 可能的障碍序列,越障过程中始终双处抓线,越障过 程稳定,可跨越防振锤、绝缘子,但不能跨越转角 塔[3 ⁃ 4] 。 中科院自动化研究所和山东科技大学共同 研制开发了 110 kV 的输电线巡检机器人,该机器人 由 3 个柔性摆动臂机构、自走驱动装置等组成,综合 了多关节分体式机构和轮臂复合机构的优点。 该机 器人结合了轮式移动和步进式蠕动爬行 2 种运动方 式,保证了一定的行走速度,且机器人整体刚度大, 姿态稳定性好,越障能力强,但是机器人由三臂组 成,关节数量多,机器人重量大,控制复杂。 中科院 沈阳自动化研究所自 2002 年研究开发了 AApe 系 列架空输电线路巡检机器人,该类机器人一般采用 轮臂复合式机构,越障能力强,行走速度快,通过质 心调节机构能够提高机器人越障稳定性,该机器人 可以在直线杆塔线路段自主行驶和巡检,通过架设 辅助导轨的方式跨越耐张杆塔。 这些机器人都具有 一定的越障能力,但跨越耐张杆塔的能力还存在较 大的不足。 针对 110 kV 输电线路环境特点及巡检任务需 求,借鉴已有机构的优点,提出了一种新型巡检机器 人机构,这种新型机构由行走机构、手臂机构、机架 和质心调节机构组成,该机构能够同时应用于导线 和地线不同线路环境,能够跨越引流线、耐张线夹等 复杂障碍物,越障流程简单易于控制,行走时安全性 好等特点。 1 任务需求与环境描述 根据 110 kV 架空输电线路的巡检任务需求,巡 检机器人需在 110 kV 输电线路架空导线上行走,可 跨越线路障碍,携带和操作可见光摄像机和红外热 成像仪,分别对线路结构及其通道进行观测检查,如 导/ 地线的受损情况、发热情况、压接管的工作状况、 线路绝缘情况、线路通道情况等,采用微波通讯方式 将图像传输至地面控制基站,并在地面控制基站上 显示摄像机拍摄的巡检图像,110 kV 输电线路环境 示意如图 1 所示。 输电线路主要由耐张塔,直线塔、 架空地线、导线、耐张塔引流线、防振锤及绝缘子等 组成。 其中导线上的主要障碍物包括防振锤、悬垂 线夹、 耐 张 线 夹、 耐 张 塔 引 流 线、 并 沟 线 夹 等。 110 kV输电线的导线线径较 500 kV 或更高等级电 压的输电线路导线更细,线路的承载能力较低,因此 需要对机器人质量更严格地控制。 由于 110 kV 输 电线路导线之间的距离较小,根据输电线带电作业 规范,为满足安全距离的要求,机器人结构尺寸必须 更加紧凑,同时由于拉线的存在,拉线与引流线间的 距离比较小,进一步限制了机器人的结构尺寸。 图 1 110 kV 输电线路环境示意图 Fig.1 Environment schematic of 110 kV transmission line 机器人沿输电线导线巡检作业时,需要跨越直 线塔和耐张塔。 直线塔处的主要障碍物为悬垂线 夹、防振锤。 耐张塔处的主要障碍物为耐张线夹、引 流线等。 耐张塔引流线是耐张绝缘子串的耐张线夹 间的电气连接线,这段导线自由地悬挂在绝缘子下 面。 耐张塔引流线由于两端无张紧力所以呈柔索状 的姿态,是一种复杂的空间曲线,它的弯曲方向存在 不确定性。 为实现全线路行走的目标,机器人必须 具备跨越直线塔、耐张塔处障碍物的能力,由上述环 境描述可知,如何跨越耐张塔引流线是越障的难点。 由于耐张塔引流线跨距大,机器人无法直接跨越,必 ·156· 智 能 系 统 学 报 第 11 卷