正在加载图片...
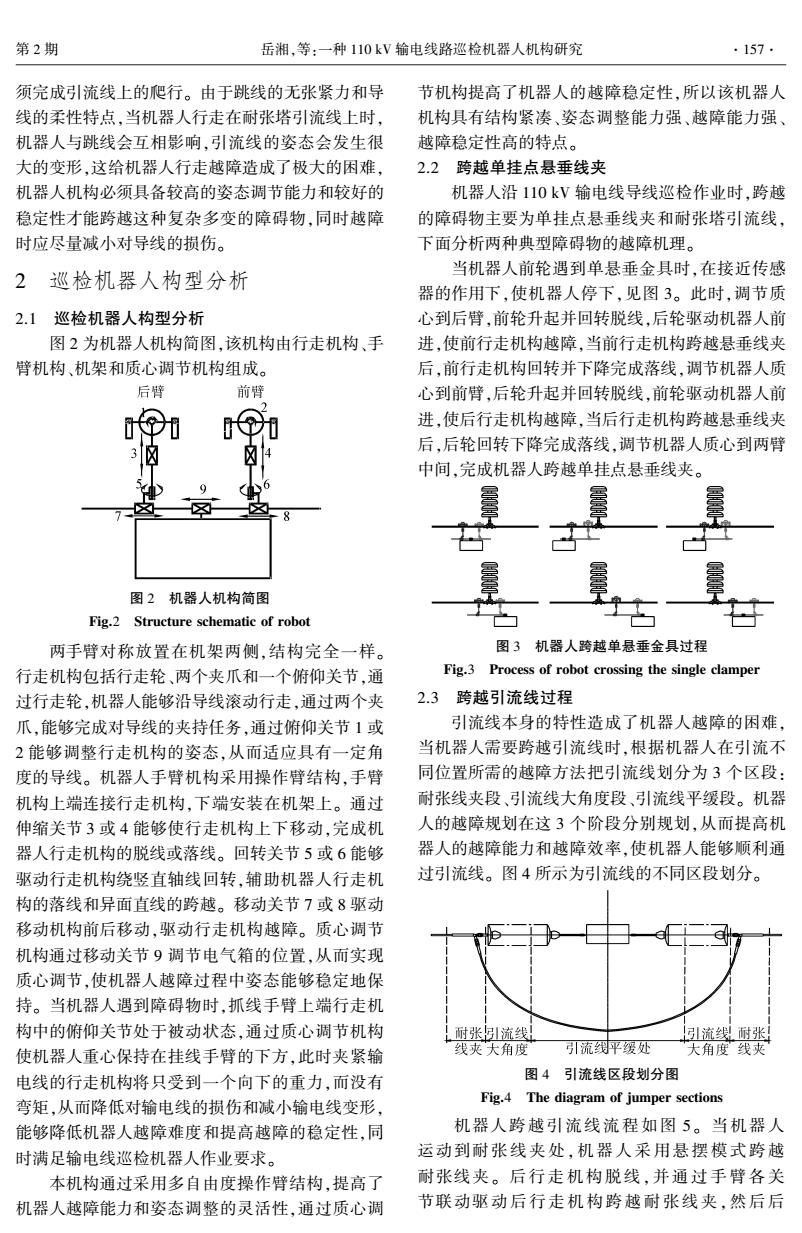
第2期 岳湘,等:一种110kV输电线路巡检机器人机构研究 ·157. 须完成引流线上的爬行。由于跳线的无张紧力和导 节机构提高了机器人的越障稳定性,所以该机器人 线的柔性特点,当机器人行走在耐张塔引流线上时, 机构具有结构紧凑、姿态调整能力强、越障能力强、 机器人与跳线会互相影响,引流线的姿态会发生很 越障稳定性高的特点。 大的变形,这给机器人行走越障造成了极大的困难, 2.2跨越单挂点悬垂线夹 机器人机构必须具备较高的姿态调节能力和较好的 机器人沿110kV输电线导线巡检作业时,跨越 稳定性才能跨越这种复杂多变的障碍物,同时越障 的障碍物主要为单挂点悬垂线夹和耐张塔引流线, 时应尽量减小对导线的损伤。 下面分析两种典型障碍物的越障机理。 2巡检机器人构型分析 当机器人前轮遇到单悬垂金具时,在接近传感 器的作用下,使机器人停下,见图3。此时,调节质 21巡检机器人构型分析 心到后臂,前轮升起并回转脱线,后轮驱动机器人前 图2为机器人机构简图,该机构由行走机构、手 进,使前行走机构越障,当前行走机构跨越悬垂线夹 臂机构、机架和质心调节机构组成。 后,前行走机构回转并下降完成落线,调节机器人质 后臂 前臂 心到前臂,后轮升起并回转脱线,前轮驱动机器人前 进,使后行走机构越障,当后行走机构跨越悬垂线夹 后,后轮回转下降完成落线,调节机器人质心到两臂 中间,完成机器人跨越单挂点悬垂线夹。 图2机器人机构简图 Fig.2 Structure schematic of robot 两手臂对称放置在机架两侧,结构完全一样。 图3机器人跨越单悬垂金具过程 行走机构包括行走轮、两个夹爪和一个俯仰关节,通 Fig.3 Process of robot crossing the single clamper 过行走轮,机器人能够沿导线滚动行走,通过两个夹 2.3跨越引流线过程 爪,能够完成对导线的夹持任务,通过俯仰关节1或 引流线本身的特性造成了机器人越障的困难, 2能够调整行走机构的姿态,从而适应具有一定角 当机器人需要跨越引流线时,根据机器人在引流不 度的导线。机器人手臂机构采用操作臂结构,手臂 同位置所需的越障方法把引流线划分为3个区段: 机构上端连接行走机构,下端安装在机架上。通过 耐张线夹段、引流线大角度段、引流线平缓段。机器 伸缩关节3或4能够使行走机构上下移动,完成机 人的越障规划在这3个阶段分别规划,从而提高机 器人行走机构的脱线或落线。回转关节5或6能够 器人的越障能力和越障效率,使机器人能够顺利通 驱动行走机构绕竖直轴线回转,辅助机器人行走机 过引流线。图4所示为引流线的不同区段划分。 构的落线和异面直线的跨越。移动关节7或8驱动 移动机构前后移动,驱动行走机构越障。质心调节 机构通过移动关节9调节电气箱的位置,从而实现 质心调节,使机器人越障过程中姿态能够稳定地保 持。当机器人遇到障碍物时,抓线手臂上端行走机 构中的俯仰关节处于被动状态,通过质心调节机构 耐张流线! 引流线耐张 使机器人重心保持在挂线手臂的下方,此时夹紧输 线夹大角度 流绸平缓处 大角度线夹 电线的行走机构将只受到一个向下的重力,而没有 图4引流线区段划分图 弯矩,从而降低对输电线的损伤和减小输电线变形, Fig.4 The diagram of jumper sections 能够降低机器人越障难度和提高越障的稳定性,同 机器人跨越引流线流程如图5。当机器人 时满足输电线巡检机器人作业要求。 运动到耐张线夹处,机器人采用悬摆模式跨越 本机构通过采用多自由度操作臂结构,提高了 耐张线夹。后行走机构脱线,并通过手臂各关 机器人越障能力和姿态调整的灵活性,通过质心调 节联动驱动后行走机构跨越耐张线夹,然后后须完成引流线上的爬行。 由于跳线的无张紧力和导 线的柔性特点,当机器人行走在耐张塔引流线上时, 机器人与跳线会互相影响,引流线的姿态会发生很 大的变形,这给机器人行走越障造成了极大的困难, 机器人机构必须具备较高的姿态调节能力和较好的 稳定性才能跨越这种复杂多变的障碍物,同时越障 时应尽量减小对导线的损伤。 2 巡检机器人构型分析 2.1 巡检机器人构型分析 图 2 为机器人机构简图,该机构由行走机构、手 臂机构、机架和质心调节机构组成。 图 2 机器人机构简图 Fig.2 Structure schematic of robot 两手臂对称放置在机架两侧,结构完全一样。 行走机构包括行走轮、两个夹爪和一个俯仰关节,通 过行走轮,机器人能够沿导线滚动行走,通过两个夹 爪,能够完成对导线的夹持任务,通过俯仰关节 1 或 2 能够调整行走机构的姿态,从而适应具有一定角 度的导线。 机器人手臂机构采用操作臂结构,手臂 机构上端连接行走机构,下端安装在机架上。 通过 伸缩关节 3 或 4 能够使行走机构上下移动,完成机 器人行走机构的脱线或落线。 回转关节 5 或 6 能够 驱动行走机构绕竖直轴线回转,辅助机器人行走机 构的落线和异面直线的跨越。 移动关节 7 或 8 驱动 移动机构前后移动,驱动行走机构越障。 质心调节 机构通过移动关节 9 调节电气箱的位置,从而实现 质心调节,使机器人越障过程中姿态能够稳定地保 持。 当机器人遇到障碍物时,抓线手臂上端行走机 构中的俯仰关节处于被动状态,通过质心调节机构 使机器人重心保持在挂线手臂的下方,此时夹紧输 电线的行走机构将只受到一个向下的重力,而没有 弯矩,从而降低对输电线的损伤和减小输电线变形, 能够降低机器人越障难度和提高越障的稳定性,同 时满足输电线巡检机器人作业要求。 本机构通过采用多自由度操作臂结构,提高了 机器人越障能力和姿态调整的灵活性,通过质心调 节机构提高了机器人的越障稳定性,所以该机器人 机构具有结构紧凑、姿态调整能力强、越障能力强、 越障稳定性高的特点。 2.2 跨越单挂点悬垂线夹 机器人沿 110 kV 输电线导线巡检作业时,跨越 的障碍物主要为单挂点悬垂线夹和耐张塔引流线, 下面分析两种典型障碍物的越障机理。 当机器人前轮遇到单悬垂金具时,在接近传感 器的作用下,使机器人停下,见图 3。 此时,调节质 心到后臂,前轮升起并回转脱线,后轮驱动机器人前 进,使前行走机构越障,当前行走机构跨越悬垂线夹 后,前行走机构回转并下降完成落线,调节机器人质 心到前臂,后轮升起并回转脱线,前轮驱动机器人前 进,使后行走机构越障,当后行走机构跨越悬垂线夹 后,后轮回转下降完成落线,调节机器人质心到两臂 中间,完成机器人跨越单挂点悬垂线夹。 图 3 机器人跨越单悬垂金具过程 Fig.3 Process of robot crossing the single clamper 2.3 跨越引流线过程 引流线本身的特性造成了机器人越障的困难, 当机器人需要跨越引流线时,根据机器人在引流不 同位置所需的越障方法把引流线划分为 3 个区段: 耐张线夹段、引流线大角度段、引流线平缓段。 机器 人的越障规划在这 3 个阶段分别规划,从而提高机 器人的越障能力和越障效率,使机器人能够顺利通 过引流线。 图 4 所示为引流线的不同区段划分。 图 4 引流线区段划分图 Fig.4 The diagram of jumper sections 机器人跨越引流线流程如图 5。 当机器人 运动到耐张线夹处,机器人采用悬摆模式跨越 耐张线夹。 后行走机构脱线,并通过 手 臂 各 关 节联动驱动后行走机构跨越耐张线夹,然后后 第 2 期 岳湘,等:一种 110 kV 输电线路巡检机器人机构研究 ·157·