正在加载图片...
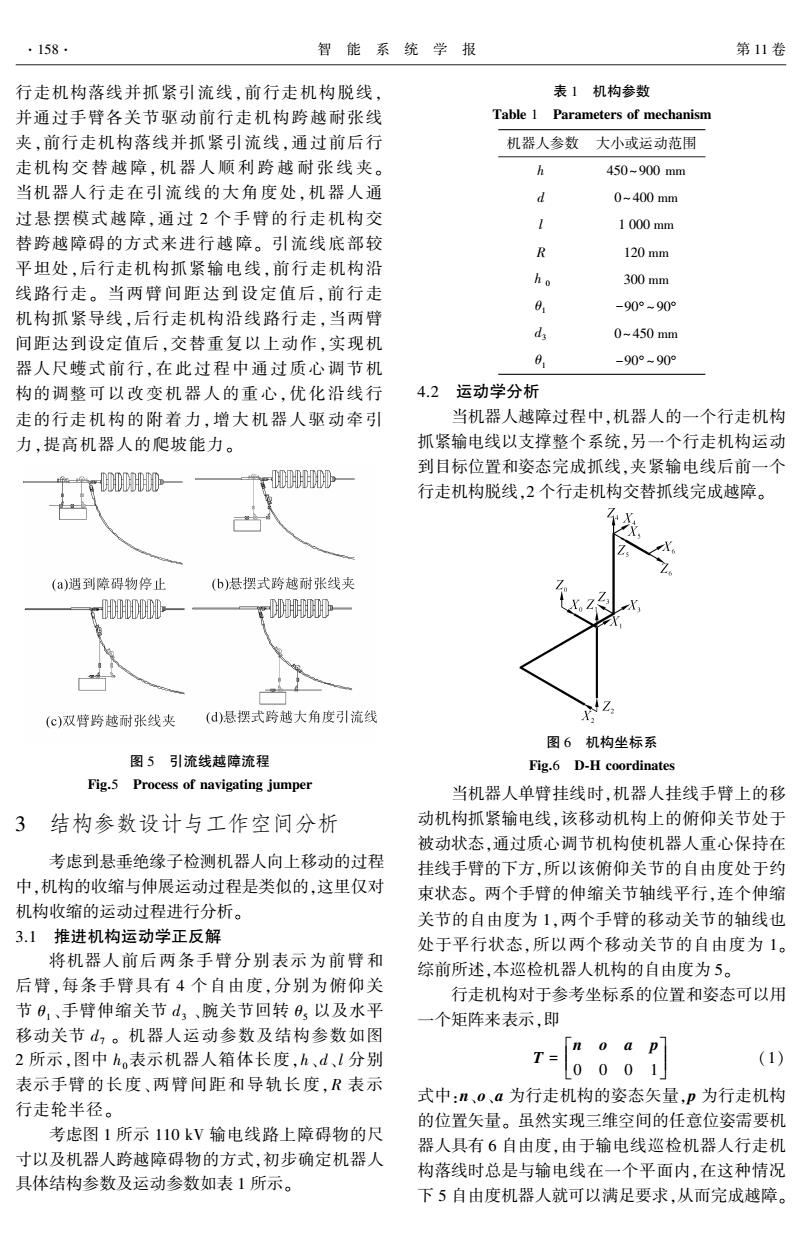
·158, 智能系统学报 第11卷 行走机构落线并抓紧引流线,前行走机构脱线, 表1机构参数 并通过手臂各关节驱动前行走机构跨越耐张线 Table 1 Parameters of mechanism 夹,前行走机构落线并抓紧引流线,通过前后行 机器人参数大小或运动范围 走机构交替越障,机器人顺利跨越耐张线夹。 450-900mm 当机器人行走在引流线的大角度处,机器人通 d 0-400mm 过悬摆模式越障,通过2个手臂的行走机构交 1000mm 替跨越障碍的方式来进行越障。引流线底部较 R 120mm 平坦处,后行走机构抓紧输电线,前行走机构沿 ho 300mm 线路行走。当两臂间距达到设定值后,前行走 8 -90°-90° 机构抓紧导线,后行走机构沿线路行走,当两臂 d 0-450mm 间距达到设定值后,交替重复以上动作,实现机 器人尺蠖式前行,在此过程中通过质心调节机 8, -90°-90° 构的调整可以改变机器人的重心,优化沿线行 4.2 运动学分析 走的行走机构的附着力,增大机器人驱动牵引 当机器人越障过程中,机器人的一个行走机构 力,提高机器人的爬坡能力。 抓紧输电线以支撑整个系统,另一个行走机构运动 到目标位置和姿态完成抓线,夹紧输电线后前一个 行走机构脱线,2个行走机构交替抓线完成越障。 (a)遇到障碍物停止 (b)悬摆式跨越耐张线夹 +HHON r印一 (d)悬摆式跨越大角度引流线 Z (c)双臂跨越耐张线夹 A: 图6机构坐标系 图5引流线越障流程 Fig.6 D-H coordinates Fig.5 Process of navigating jumper 当机器人单臂挂线时,机器人挂线手臂上的移 3 结构参数设计与工作空间分析 动机构抓紧输电线,该移动机构上的俯仰关节处于 被动状态,通过质心调节机构使机器人重心保持在 考虑到悬垂绝缘子检测机器人向上移动的过程 挂线手臂的下方,所以该俯仰关节的自由度处于约 中,机构的收缩与伸展运动过程是类似的,这里仅对 束状态。两个手臂的伸缩关节轴线平行,连个伸缩 机构收缩的运动过程进行分析。 关节的自由度为1,两个手臂的移动关节的轴线也 3.1推进机构运动学正反解 处于平行状态,所以两个移动关节的自由度为1。 将机器人前后两条手臂分别表示为前臂和 综前所述,本巡检机器人机构的自由度为5。 后臂,每条手臂具有4个自由度,分别为俯仰关 行走机构对于参考坐标系的位置和姿态可以用 节0,、手臂伸缩关节d,、腕关节回转0,以及水平 一个矩阵来表示,即 移动关节d,。机器人运动参数及结构参数如图 n o a 2所示,图中h表示机器人箱体长度,h、d、l分别 T= 0001 (1) 表示手臂的长度、两臂间距和导轨长度,R表示 式中:n、o、a为行走机构的姿态矢量,p为行走机构 行走轮半径。 的位置矢量。虽然实现三维空间的任意位姿需要机 考虑图1所示110kV输电线路上障碍物的尺 器人具有6自由度,由于输电线巡检机器人行走机 寸以及机器人跨越障碍物的方式,初步确定机器人 构落线时总是与输电线在一个平面内,在这种情况 具体结构参数及运动参数如表1所示。 下5自由度机器人就可以满足要求,从而完成越障。行走机构落线并抓紧引流线,前行走机构脱线, 并通过手臂各关节驱动前行走机构跨越耐张线 夹,前行走机构落线并抓紧引流线,通过前后行 走机构 交 替 越 障, 机 器 人 顺 利 跨 越 耐 张 线 夹。 当机器人行走在引流线的大角度处,机器人通 过悬摆模式越障,通过 2 个手臂的行走机构交 替跨越障碍的方式来进行越障。 引流线底部较 平坦处,后行走机构抓紧输电线,前行走机构沿 线路行走。 当两臂间距达到设定值 后,前 行 走 机构抓紧导线,后行走机构沿线路行走,当两臂 间距达到设定值后,交替重复以上动作,实现机 器人尺蠖式前行,在此过程中通过质心调节机 构的调整可以改变机器人的重心,优化沿线行 走的行走机构的附着力,增大机器人驱动牵引 力,提高机器人的爬坡能力。 图 5 引流线越障流程 Fig.5 Process of navigating jumper 3 结构参数设计与工作空间分析 考虑到悬垂绝缘子检测机器人向上移动的过程 中,机构的收缩与伸展运动过程是类似的,这里仅对 机构收缩的运动过程进行分析。 3.1 推进机构运动学正反解 将机器人前后两条手臂分别表示为前臂和 后臂,每条手臂具有 4 个自由度,分别为俯仰关 节 θ1 、手臂伸缩关节 d3 、腕关节回转 θ5 以及水平 移动关节 d7 。 机器人运动参数及结构参数如图 2 所示,图中 h0表示机器人箱体长度,h、d、l 分别 表示手臂的长度、两臂间距和导轨长度,R 表示 行走轮半径。 考虑图 1 所示 110 kV 输电线路上障碍物的尺 寸以及机器人跨越障碍物的方式,初步确定机器人 具体结构参数及运动参数如表 1 所示。 表 1 机构参数 Table 1 Parameters of mechanism 机器人参数 大小或运动范围 h 450~ 900 mm d 0~ 400 mm l 1 000 mm R 120 mm h 0 300 mm θ1 -90° ~ 90° d3 0~ 450 mm θ1 -90° ~ 90° 4.2 运动学分析 当机器人越障过程中,机器人的一个行走机构 抓紧输电线以支撑整个系统,另一个行走机构运动 到目标位置和姿态完成抓线,夹紧输电线后前一个 行走机构脱线,2 个行走机构交替抓线完成越障。 图 6 机构坐标系 Fig.6 D⁃H coordinates 当机器人单臂挂线时,机器人挂线手臂上的移 动机构抓紧输电线,该移动机构上的俯仰关节处于 被动状态,通过质心调节机构使机器人重心保持在 挂线手臂的下方,所以该俯仰关节的自由度处于约 束状态。 两个手臂的伸缩关节轴线平行,连个伸缩 关节的自由度为 1,两个手臂的移动关节的轴线也 处于平行状态,所以两个移动关节的自由度为 1。 综前所述,本巡检机器人机构的自由度为 5。 行走机构对于参考坐标系的位置和姿态可以用 一个矩阵来表示,即 T = n o a p 0 0 0 1 é ë ê ê ù û ú ú (1) 式中:n、o、a 为行走机构的姿态矢量,p 为行走机构 的位置矢量。 虽然实现三维空间的任意位姿需要机 器人具有 6 自由度,由于输电线巡检机器人行走机 构落线时总是与输电线在一个平面内,在这种情况 下 5 自由度机器人就可以满足要求,从而完成越障。 ·158· 智 能 系 统 学 报 第 11 卷