正在加载图片...
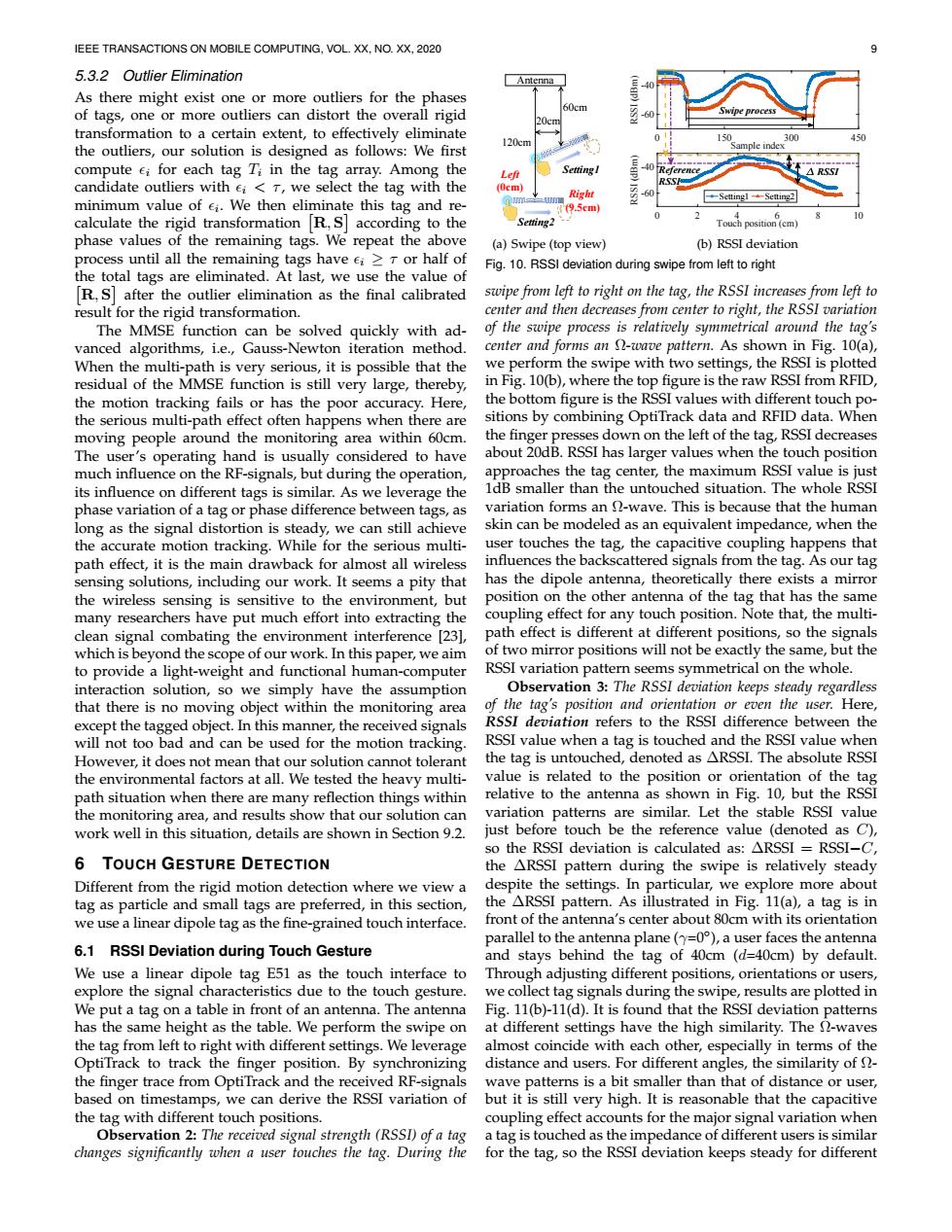
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 5.3.2 Outlier Elimination Antenna As there might exist one or more outliers for the phases of tags,one or more outliers can distort the overall rigid transformation to a certain extent,to effectively eliminate 120cm nple index 300 the outliers,our solution is designed as follows:We first compute ei for each tag Ti in the tag array.Among the A RSSI candidate outliers with ei<T,we select the tag with the Right Settingl-Setting2 minimum value of ci.We then eliminate this tag and re- (9.5cm) calculate the rigid transformation R,S according to the Setting2 Touch position (cm) phase values of the remaining tags.We repeat the above (a)Swipe (top view) (b)RSSI deviation process until all the remaining tags have e>r or half of Fig.10.RSSI deviation during swipe from left to right the total tags are eliminated.At last,we use the value of R,S after the outlier elimination as the final calibrated swipe from left to right on the tag,the RSSI increases from left to result for the rigid transformation. center and then decreases from center to right,the RSSI variation The MMSE function can be solved quickly with ad- of the swipe process is relatively symmetrical around the tag's vanced algorithms,i.e.,Gauss-Newton iteration method. center and forms an -wave pattern.As shown in Fig.10(a) When the multi-path is very serious,it is possible that the we perform the swipe with two settings,the RSSI is plotted residual of the MMSE function is still very large,thereby, in Fig.10(b),where the top figure is the raw RSSI from RFID, the motion tracking fails or has the poor accuracy.Here, the bottom figure is the RSSI values with different touch po- the serious multi-path effect often happens when there are sitions by combining OptiTrack data and RFID data.When moving people around the monitoring area within 60cm the finger presses down on the left of the tag,RSSI decreases The user's operating hand is usually considered to have about 20dB.RSSI has larger values when the touch position much influence on the RF-signals,but during the operation, approaches the tag center,the maximum RSSI value is just its influence on different tags is similar.As we leverage the 1dB smaller than the untouched situation.The whole RSSI phase variation of a tag or phase difference between tags,as variation forms an !-wave.This is because that the human long as the signal distortion is steady,we can still achieve skin can be modeled as an equivalent impedance,when the the accurate motion tracking.While for the serious multi- user touches the tag,the capacitive coupling happens that path effect,it is the main drawback for almost all wireless influences the backscattered signals from the tag.As our tag sensing solutions,including our work.It seems a pity that has the dipole antenna,theoretically there exists a mirror the wireless sensing is sensitive to the environment,but position on the other antenna of the tag that has the same many researchers have put much effort into extracting the coupling effect for any touch position.Note that,the multi- clean signal combating the environment interference [23], path effect is different at different positions,so the signals which is beyond the scope of our work.In this paper,we aim of two mirror positions will not be exactly the same,but the to provide a light-weight and functional human-computer RSSI variation pattern seems symmetrical on the whole. interaction solution,so we simply have the assumption Observation 3:The RSSI deviation keeps steady regardless that there is no moving object within the monitoring area of the tag's position and orientation or even the user.Here, except the tagged object.In this manner,the received signals RSSI deviation refers to the RSSI difference between the will not too bad and can be used for the motion tracking. RSSI value when a tag is touched and the RSSI value when However,it does not mean that our solution cannot tolerant the tag is untouched,denoted as ARSSI.The absolute RSSI the environmental factors at all.We tested the heavy multi- value is related to the position or orientation of the tag path situation when there are many reflection things within relative to the antenna as shown in Fig.10,but the RSSI the monitoring area,and results show that our solution can variation patterns are similar.Let the stable RSSI value work well in this situation,details are shown in Section 9.2. just before touch be the reference value (denoted as C), so the RSSI deviation is calculated as:ARSSI RSSI-C, 6 TOUCH GESTURE DETECTION the ARSSI pattern during the swipe is relatively steady Different from the rigid motion detection where we view a despite the settings.In particular,we explore more about tag as particle and small tags are preferred,in this section, the ARSSI pattern.As illustrated in Fig.11(a),a tag is in we use a linear dipole tag as the fine-grained touch interface. front of the antenna's center about 80cm with its orientation parallel to the antenna plane(=0),a user faces the antenna 6.1 RSSI Deviation during Touch Gesture and stays behind the tag of 40cm (d=40cm)by default. We use a linear dipole tag E51 as the touch interface to Through adjusting different positions,orientations or users, explore the signal characteristics due to the touch gesture. we collect tag signals during the swipe,results are plotted in We put a tag on a table in front of an antenna.The antenna Fig.11(b)-11(d).It is found that the RSSI deviation patterns has the same height as the table.We perform the swipe on at different settings have the high similarity.The n-waves the tag from left to right with different settings.We leverage almost coincide with each other,especially in terms of the OptiTrack to track the finger position.By synchronizing distance and users.For different angles,the similarity of the finger trace from OptiTrack and the received RF-signals wave patterns is a bit smaller than that of distance or user, based on timestamps,we can derive the RSSI variation of but it is still very high.It is reasonable that the capacitive the tag with different touch positions. coupling effect accounts for the major signal variation when Observation 2:The received signal strength(RSSI)of a tag a tag is touched as the impedance of different users is similar changes significantly when a user touches the tag.During the for the tag,so the RSSI deviation keeps steady for differentIEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 9 5.3.2 Outlier Elimination As there might exist one or more outliers for the phases of tags, one or more outliers can distort the overall rigid transformation to a certain extent, to effectively eliminate the outliers, our solution is designed as follows: We first compute i for each tag Ti in the tag array. Among the candidate outliers with i < τ , we select the tag with the minimum value of i . We then eliminate this tag and recalculate the rigid transformation R, S according to the phase values of the remaining tags. We repeat the above process until all the remaining tags have i ≥ τ or half of the total tags are eliminated. At last, we use the value of R, S after the outlier elimination as the final calibrated result for the rigid transformation. The MMSE function can be solved quickly with advanced algorithms, i.e., Gauss-Newton iteration method. When the multi-path is very serious, it is possible that the residual of the MMSE function is still very large, thereby, the motion tracking fails or has the poor accuracy. Here, the serious multi-path effect often happens when there are moving people around the monitoring area within 60cm. The user’s operating hand is usually considered to have much influence on the RF-signals, but during the operation, its influence on different tags is similar. As we leverage the phase variation of a tag or phase difference between tags, as long as the signal distortion is steady, we can still achieve the accurate motion tracking. While for the serious multipath effect, it is the main drawback for almost all wireless sensing solutions, including our work. It seems a pity that the wireless sensing is sensitive to the environment, but many researchers have put much effort into extracting the clean signal combating the environment interference [23], which is beyond the scope of our work. In this paper, we aim to provide a light-weight and functional human-computer interaction solution, so we simply have the assumption that there is no moving object within the monitoring area except the tagged object. In this manner, the received signals will not too bad and can be used for the motion tracking. However, it does not mean that our solution cannot tolerant the environmental factors at all. We tested the heavy multipath situation when there are many reflection things within the monitoring area, and results show that our solution can work well in this situation, details are shown in Section 9.2. 6 TOUCH GESTURE DETECTION Different from the rigid motion detection where we view a tag as particle and small tags are preferred, in this section, we use a linear dipole tag as the fine-grained touch interface. 6.1 RSSI Deviation during Touch Gesture We use a linear dipole tag E51 as the touch interface to explore the signal characteristics due to the touch gesture. We put a tag on a table in front of an antenna. The antenna has the same height as the table. We perform the swipe on the tag from left to right with different settings. We leverage OptiTrack to track the finger position. By synchronizing the finger trace from OptiTrack and the received RF-signals based on timestamps, we can derive the RSSI variation of the tag with different touch positions. Observation 2: The received signal strength (RSSI) of a tag changes significantly when a user touches the tag. During the Left (0cm) Right (9.5cm) Center Antenna Setting1 Setting2 120cm 60cm 20cm Left (0cm) Right (9.5cm) (a) Swipe (top view) 0 2 4 6 8 10 Touch position (cm) -60 -40 RSSI (dBm) Setting1 Setting2 0 150 300 450 Sample index -60 -40 RSSI (dBm) Swipe process Reference RSSI RSSI (b) RSSI deviation Fig. 10. RSSI deviation during swipe from left to right swipe from left to right on the tag, the RSSI increases from left to center and then decreases from center to right, the RSSI variation of the swipe process is relatively symmetrical around the tag’s center and forms an Ω-wave pattern. As shown in Fig. 10(a), we perform the swipe with two settings, the RSSI is plotted in Fig. 10(b), where the top figure is the raw RSSI from RFID, the bottom figure is the RSSI values with different touch positions by combining OptiTrack data and RFID data. When the finger presses down on the left of the tag, RSSI decreases about 20dB. RSSI has larger values when the touch position approaches the tag center, the maximum RSSI value is just 1dB smaller than the untouched situation. The whole RSSI variation forms an Ω-wave. This is because that the human skin can be modeled as an equivalent impedance, when the user touches the tag, the capacitive coupling happens that influences the backscattered signals from the tag. As our tag has the dipole antenna, theoretically there exists a mirror position on the other antenna of the tag that has the same coupling effect for any touch position. Note that, the multipath effect is different at different positions, so the signals of two mirror positions will not be exactly the same, but the RSSI variation pattern seems symmetrical on the whole. Observation 3: The RSSI deviation keeps steady regardless of the tag’s position and orientation or even the user. Here, RSSI deviation refers to the RSSI difference between the RSSI value when a tag is touched and the RSSI value when the tag is untouched, denoted as ∆RSSI. The absolute RSSI value is related to the position or orientation of the tag relative to the antenna as shown in Fig. 10, but the RSSI variation patterns are similar. Let the stable RSSI value just before touch be the reference value (denoted as C), so the RSSI deviation is calculated as: ∆RSSI = RSSI−C, the ∆RSSI pattern during the swipe is relatively steady despite the settings. In particular, we explore more about the ∆RSSI pattern. As illustrated in Fig. 11(a), a tag is in front of the antenna’s center about 80cm with its orientation parallel to the antenna plane (γ=0◦ ), a user faces the antenna and stays behind the tag of 40cm (d=40cm) by default. Through adjusting different positions, orientations or users, we collect tag signals during the swipe, results are plotted in Fig. 11(b)-11(d). It is found that the RSSI deviation patterns at different settings have the high similarity. The Ω-waves almost coincide with each other, especially in terms of the distance and users. For different angles, the similarity of Ω- wave patterns is a bit smaller than that of distance or user, but it is still very high. It is reasonable that the capacitive coupling effect accounts for the major signal variation when a tag is touched as the impedance of different users is similar for the tag, so the RSSI deviation keeps steady for different����