正在加载图片...
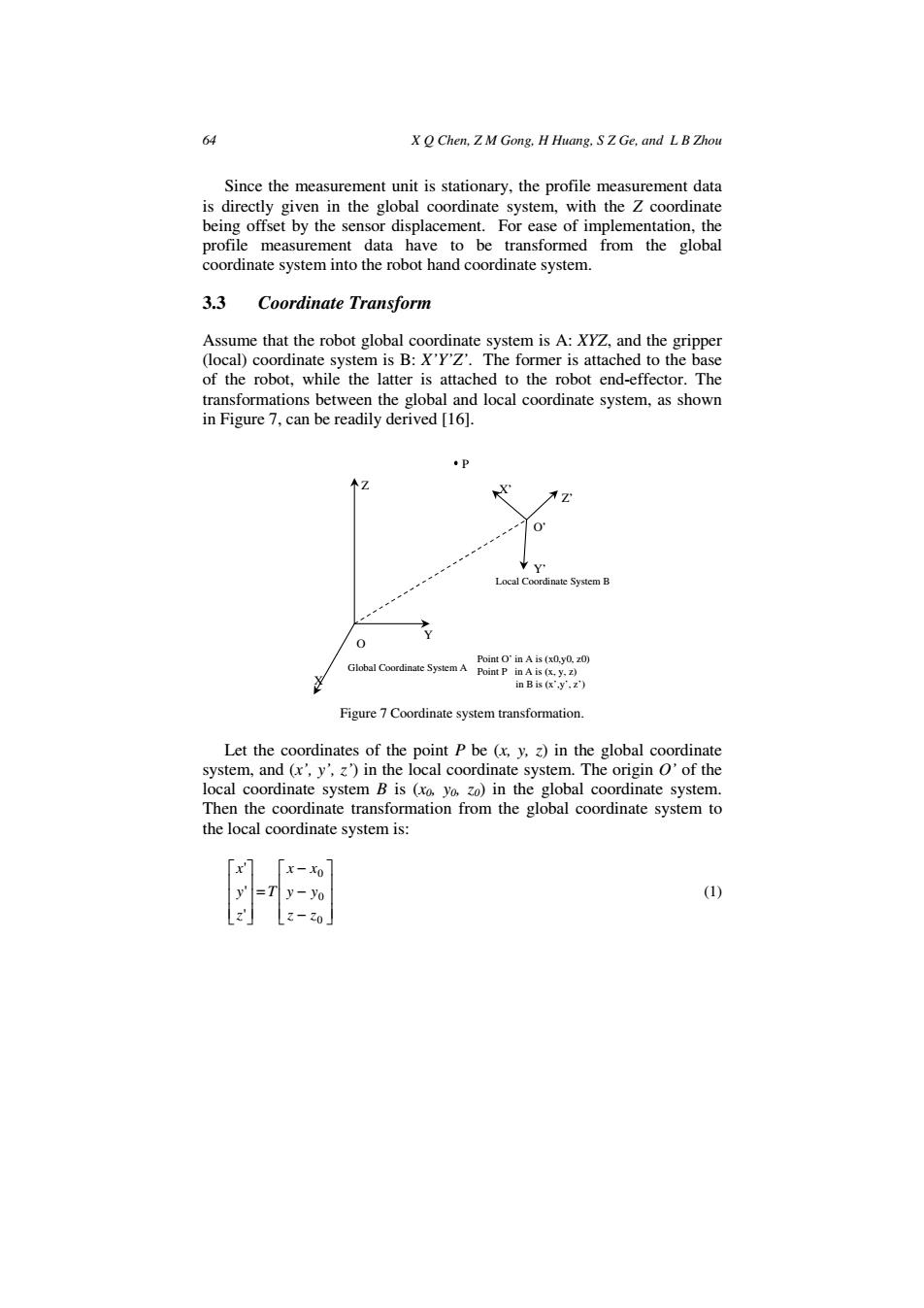
64 X O Chen,Z M Gong,H Huang.S Z Ge,and L B Zhou Since the measurement unit is stationary,the profile measurement data is directly given in the global coordinate system,with the Z coordinate being offset by the sensor displacement.For ease of implementation,the profile measurement data have to be transformed from the global coordinate system into the robot hand coordinate system. 3.3 Coordinate Transform Assume that the robot global coordinate system is A:XYZ,and the gripper (local)coordinate system is B:X'Y'Z'.The former is attached to the base of the robot,while the latter is attached to the robot end-effector.The transformations between the global and local coordinate system,as shown in Figure 7,can be readily derived [16]. ·P Z 0 Local Coordinate System B 0 Point O'in A is (x0.y0.z0) Global Coordinate SystemA Point P in A is (x.y.z) in B is (x'y'.z") Figure 7 Coordinate system transformation. Let the coordinates of the point P be (x,y,z)in the global coordinate system,and (x',y',)in the local coordinate system.The origin O'of the local coordinate system B is (xo.yo,zo)in the global coordinate system. Then the coordinate transformation from the global coordinate system to the local coordinate system is: x-x0 =T y-yo (1) z-Z064 X Q Chen, Z M Gong, H Huang, S Z Ge, and L B Zhou Since the measurement unit is stationary, the profile measurement data is directly given in the global coordinate system, with the Z coordinate being offset by the sensor displacement. For ease of implementation, the profile measurement data have to be transformed from the global coordinate system into the robot hand coordinate system. 3.3 Coordinate Transform Assume that the robot global coordinate system is A: XYZ, and the gripper (local) coordinate system is B: X’Y’Z’. The former is attached to the base of the robot, while the latter is attached to the robot end-effector. The transformations between the global and local coordinate system, as shown in Figure 7, can be readily derived [16]. O Z X Y O’ X’ Z’ Y’ P Global Coordinate System A Local Coordinate System B Point O’ in A is (x0,y0, z0) Point P in A is (x, y, z) in B is (x’,y’, z’) Figure 7 Coordinate system transformation. Let the coordinates of the point P be (x, y, z) in the global coordinate system, and (x’, y’, z’) in the local coordinate system. The origin O’ of the local coordinate system B is (x0, y0, z0) in the global coordinate system. Then the coordinate transformation from the global coordinate system to the local coordinate system is: − − − = 0 0 0 ' ' ' z z y y x x T z y x (1)