正在加载图片...
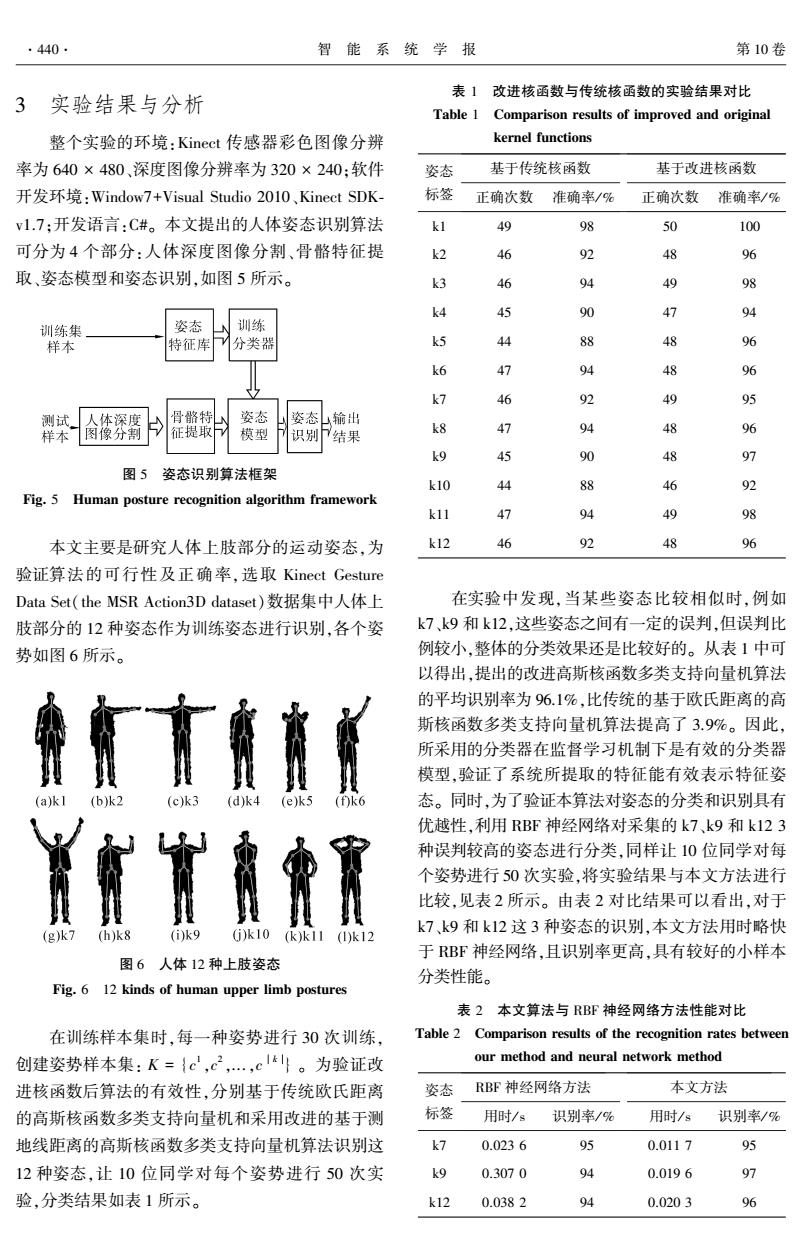
.440 智能系统学报 第10卷 表1改进核函数与传统核函数的实验结果对比 3 实验结果与分析 Table 1 Comparison results of improved and original 整个实验的环境:Kinect传感器彩色图像分辨 kernel functions 率为640×480、深度图像分辨率为320×240:软件 姿态 基于传统核函数 基于改进核函数 开发环境:Window7+Visual Studio20l0、Kinect SDK 标签 正确次数 准确率/% 正确次数 准确率/% v1.7:开发语言:C#。本文提出的人体姿态识别算法 k 49 98 50 100 可分为4个部分:人体深度图像分割、骨骼特征提 k2 46 92 48 96 取、姿态模型和姿态识别,如图5所示。 k3 46 94 49 98 k4 45 90 47 94 训练集 姿态 训练 样本 特征库 分类器 k5 44 88 48 96 k6 47 4 48 96 k7 4日 49 95 测试 人体深度 骨骼特 姿态 姿态 输出 样本 图像分割 征提取h7 模型 识别 结果 k8 47 48 96 k9 45 90 48 97 图5 姿态识别算法框架 k10 88 46 92 Fig.5 Human posture recognition algorithm framework k11 47 94 49 98 本文主要是研究人体上肢部分的运动姿态,为 k12 46 92 48 96 验证算法的可行性及正确率,选取Kinect Gesture Data Set(the MSR Action3 D dataset)数据集中人体上 在实验中发现,当某些姿态比较相似时,例如 肢部分的12种姿态作为训练姿态进行识别,各个姿 k7、k9和k12,这些姿态之间有一定的误判,但误判比 势如图6所示。 例较小,整体的分类效果还是比较好的。从表1中可 以得出,提出的改进高斯核函数多类支持向量机算法 的平均识别率为96.1%,比传统的基于欧氏距离的高 斯核函数多类支持向量机算法提高了3.9%。因此, 所采用的分类器在监督学习机制下是有效的分类器 模型,验证了系统所提取的特征能有效表示特征姿 (a)kI (b)k2 (c)k3 (d)k4 k5 态。同时,为了验证本算法对姿态的分类和识别具有 优越性,利用RBF神经网络对采集的k7、k9和k123 种误判较高的姿态进行分类,同样让10位同学对每 个姿势进行50次实验,将实验结果与本文方法进行 比较,见表2所示。由表2对比结果可以看出,对于 k7、k9和k12这3种姿态的识别,本文方法用时略快 (h)k8 (i)k9 G)k10(k)k1L()k12 于RBF神经网络,且识别率更高,具有较好的小样本 图6人体12种上肢姿态 分类性能。 Fig.6 12 kinds of human upper limb postures 表2本文算法与RBF神经网络方法性能对比 在训练样本集时,每一种姿势进行30次训练, Table 2 Comparison results of the recognition rates between 创建姿势样本集:K={c,c2,…,c。为验证改 our method and neural network method 进核函数后算法的有效性,分别基于传统欧氏距离 姿态 RBF神经网络方法 本文方法 的高斯核函数多类支持向量机和采用改进的基于测 标签 用时/s 识别率/% 用时/s 识别率/% 地线距离的高斯核函数多类支持向量机算法识别这 k7 0.0236 95 0.0117 95 12种姿态,让10位同学对每个姿势进行50次实 k9 0.3070 94 0.0196 97 验,分类结果如表1所示。 k12 0.0382 94 0.0203 963 实验结果与分析 整个实验的环境:Kinect 传感器彩色图像分辨 率为 640 × 480、深度图像分辨率为 320 × 240;软件 开发环境:Window7+Visual Studio 2010、Kinect SDK⁃ v1.7;开发语言:C#。 本文提出的人体姿态识别算法 可分为 4 个部分:人体深度图像分割、骨骼特征提 取、姿态模型和姿态识别,如图 5 所示。 图 5 姿态识别算法框架 Fig. 5 Human posture recognition algorithm framework 本文主要是研究人体上肢部分的运动姿态,为 验证算法的可行性及正确率,选取 Kinect Gesture Data Set(the MSR Action3D dataset)数据集中人体上 肢部分的 12 种姿态作为训练姿态进行识别,各个姿 势如图 6 所示。 图 6 人体 12 种上肢姿态 Fig. 6 12 kinds of human upper limb postures 在训练样本集时,每一种姿势进行 30 次训练, 创建姿势样本集: K = {c 1 ,c 2 ,...,c k } 。 为验证改 进核函数后算法的有效性,分别基于传统欧氏距离 的高斯核函数多类支持向量机和采用改进的基于测 地线距离的高斯核函数多类支持向量机算法识别这 12 种姿态,让 10 位同学对每个姿势进行 50 次实 验,分类结果如表 1 所示。 表 1 改进核函数与传统核函数的实验结果对比 Table 1 Comparison results of improved and original kernel functions 姿态 标签 基于传统核函数 正确次数 准确率/ % 基于改进核函数 正确次数 准确率/ % k1 49 98 50 100 k2 46 92 48 96 k3 46 94 49 98 k4 45 90 47 94 k5 44 88 48 96 k6 47 94 48 96 k7 46 92 49 95 k8 47 94 48 96 k9 45 90 48 97 k10 44 88 46 92 k11 47 94 49 98 k12 46 92 48 96 在实验中发现,当某些姿态比较相似时,例如 k7、k9 和 k12,这些姿态之间有一定的误判,但误判比 例较小,整体的分类效果还是比较好的。 从表 1 中可 以得出,提出的改进高斯核函数多类支持向量机算法 的平均识别率为 96.1%,比传统的基于欧氏距离的高 斯核函数多类支持向量机算法提高了 3.9%。 因此, 所采用的分类器在监督学习机制下是有效的分类器 模型,验证了系统所提取的特征能有效表示特征姿 态。 同时,为了验证本算法对姿态的分类和识别具有 优越性,利用 RBF 神经网络对采集的 k7、k9 和 k12 3 种误判较高的姿态进行分类,同样让 10 位同学对每 个姿势进行 50 次实验,将实验结果与本文方法进行 比较,见表 2 所示。 由表 2 对比结果可以看出,对于 k7、k9 和 k12 这 3 种姿态的识别,本文方法用时略快 于 RBF 神经网络,且识别率更高,具有较好的小样本 分类性能。 表 2 本文算法与 RBF 神经网络方法性能对比 Table 2 Comparison results of the recognition rates between our method and neural network method 姿态 标签 RBF 神经网络方法 用时/ s 识别率/ % 本文方法 用时/ s 识别率/ % k7 0.023 6 95 0.011 7 95 k9 0.307 0 94 0.019 6 97 k12 0.038 2 94 0.020 3 96 ·440· 智 能 系 统 学 报 第 10 卷