正在加载图片...
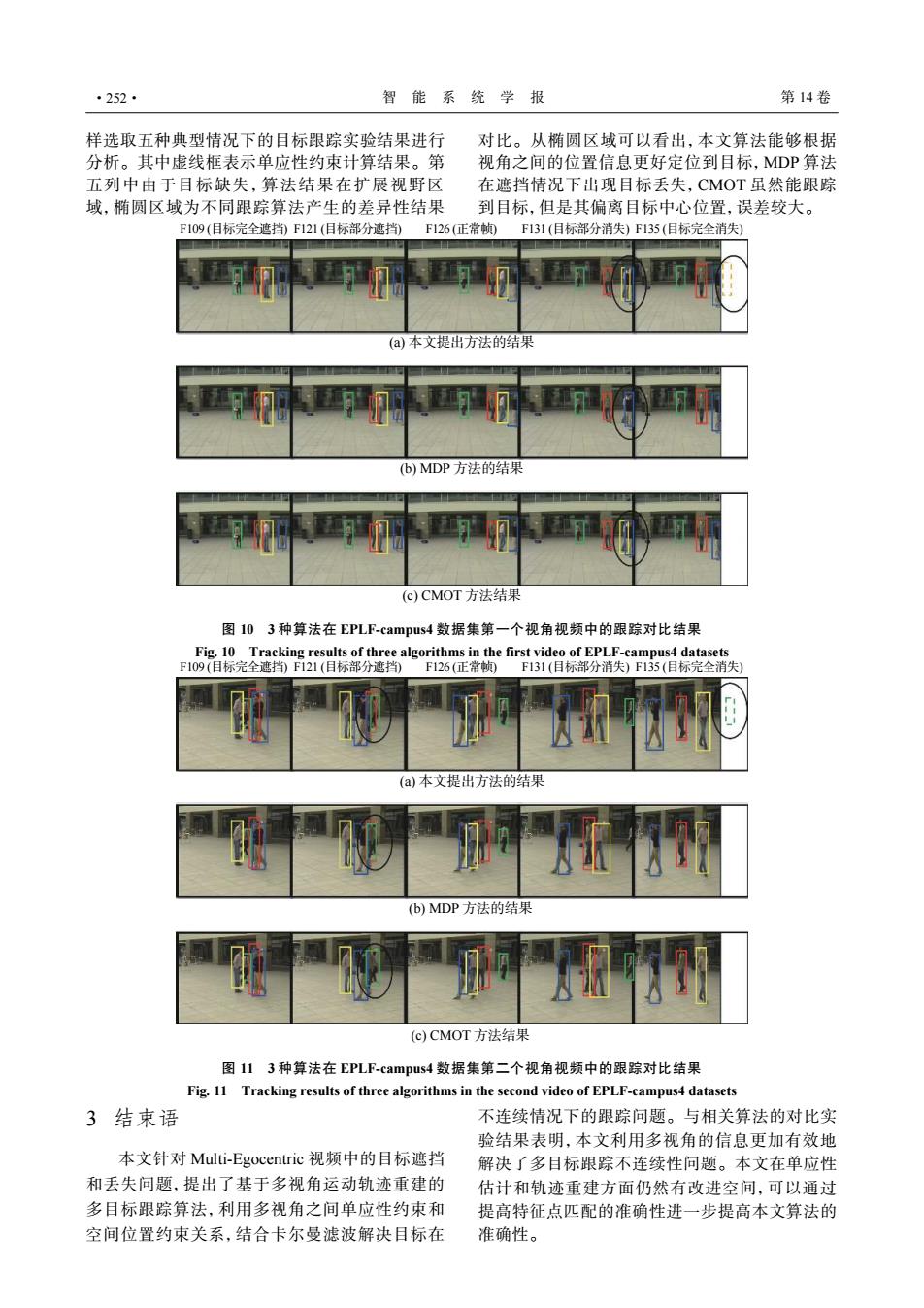
·252· 智能系统学报 第14卷 样选取五种典型情况下的目标跟踪实验结果进行 对比。从椭圆区域可以看出,本文算法能够根据 分析。其中虚线框表示单应性约束计算结果。第 视角之间的位置信息更好定位到目标,MDP算法 五列中由于目标缺失,算法结果在扩展视野区 在遮挡情况下出现目标丢失,CMOT虽然能跟踪 域,椭圆区域为不同跟踪算法产生的差异性结果 到目标,但是其偏离目标中心位置,误差较大。 F109(目标完全遮挡F121(目标部分遮挡) F126(正常帧 F131(目标部分消失)F135(目标完全消失) (@)本文提出方法的结果 (b)MDP方法的结果 (c)CMOT方法结果 图103种算法在EPLF-campus-4数据集第一个视角视频中的跟踪对比结果 Fig.10 Tracking results of three algorithms in the first video of EPLF-campus4 datasets F109(目标完全遮均F121(目标部分遮挡F126(正常询F131(目标部分消失)F135(目标完全消失) (a)本文提出方法的结果 (b)MDP方法的结果 (c)CMOT方法结果 图113种算法在EPLF-campus4数据集第二个视角视频中的跟踪对比结果 Fig.11 Tracking results of three algorithms in the second video of EPLF-campus4 datasets 3结束语 不连续情况下的跟踪问题。与相关算法的对比实 验结果表明,本文利用多视角的信息更加有效地 本文针对Multi-.Egocentric视频中的目标遮挡 解决了多目标跟踪不连续性问题。本文在单应性 和丢失问题,提出了基于多视角运动轨迹重建的 估计和轨迹重建方面仍然有改进空间,可以通过 多目标跟踪算法,利用多视角之间单应性约束和 提高特征点匹配的准确性进一步提高本文算法的 空间位置约束关系,结合卡尔曼滤波解决目标在 准确性。样选取五种典型情况下的目标跟踪实验结果进行 分析。其中虚线框表示单应性约束计算结果。第 五列中由于目标缺失,算法结果在扩展视野区 域,椭圆区域为不同跟踪算法产生的差异性结果 对比。从椭圆区域可以看出,本文算法能够根据 视角之间的位置信息更好定位到目标,MDP 算法 在遮挡情况下出现目标丢失,CMOT 虽然能跟踪 到目标,但是其偏离目标中心位置,误差较大。 3 结束语 本文针对 Multi-Egocentric 视频中的目标遮挡 和丢失问题,提出了基于多视角运动轨迹重建的 多目标跟踪算法,利用多视角之间单应性约束和 空间位置约束关系,结合卡尔曼滤波解决目标在 不连续情况下的跟踪问题。与相关算法的对比实 验结果表明,本文利用多视角的信息更加有效地 解决了多目标跟踪不连续性问题。本文在单应性 估计和轨迹重建方面仍然有改进空间,可以通过 提高特征点匹配的准确性进一步提高本文算法的 准确性。 F109 (目标完全遮挡) F121 (目标部分遮挡) F126 (正常帧) F131 (目标部分消失) F135 (目标完全消失) (a) 本文提出方法的结果 (b) MDP 方法的结果 (c) CMOT 方法结果 图 10 3 种算法在 EPLF-campus4 数据集第一个视角视频中的跟踪对比结果 Fig. 10 Tracking results of three algorithms in the first video of EPLF-campus4 datasets F109 (目标完全遮挡) F121 (目标部分遮挡) F126 (正常帧) F131 (目标部分消失) F135 (目标完全消失) (a) 本文提出方法的结果 (b) MDP 方法的结果 (c) CMOT 方法结果 图 11 3 种算法在 EPLF-campus4 数据集第二个视角视频中的跟踪对比结果 Fig. 11 Tracking results of three algorithms in the second video of EPLF-campus4 datasets ·252· 智 能 系 统 学 报 第 14 卷