正在加载图片...
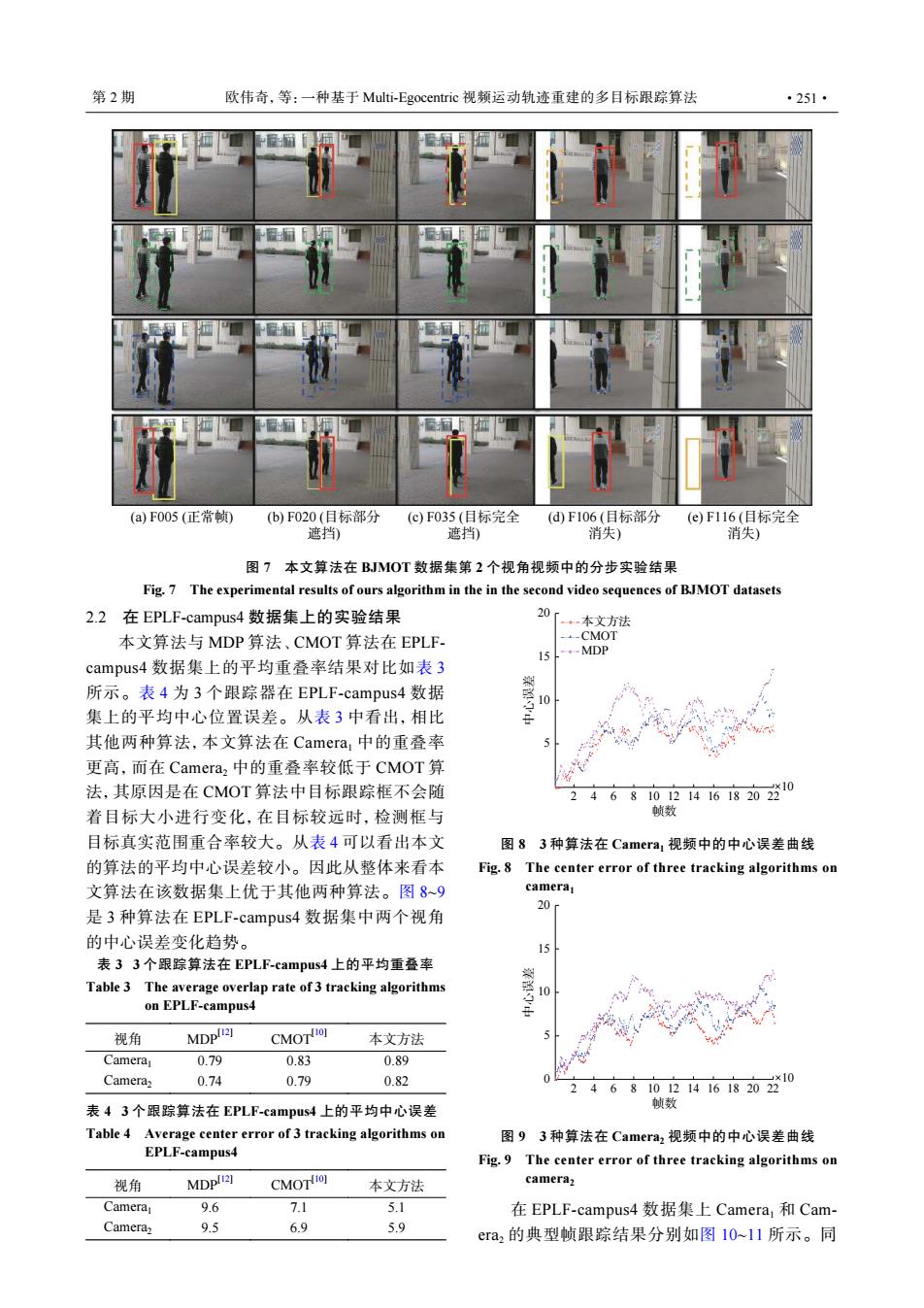
第2期 欧伟奇,等:一种基于Multi-Egocentric视频运动轨迹重建的多目标跟踪算法 ·251· (a)F005(正常帧) (b)F020(目标部分 (c)F035(目标完全 (dF106(目标部分 (e)F116(目标完全 遮挡) 遮挡) 消失) 消失) 图7本文算法在BJMOT数据集第2个视角视频中的分步实验结果 Fig.7 The experimental results of ours algorithm in the in the second video sequences of B.MOT datasets 2.2在EPLF-campus.4数据集上的实验结果 20 -·-本文方法 本文算法与MDP算法、CMOT算法在EPLF- -CMOT 15 -MDP campus4数据集上的平均重叠率结果对比如表3 所示。表4为3个跟踪器在EPLF-campus4数据 集上的平均中心位置误差。从表3中看出,相比 其他两种算法,本文算法在Camera,中的重叠率 更高,而在Camera.2中的重叠率较低于CMOT算 法,其原因是在CMOT算法中目标跟踪框不会随 2 468102141618202登10 着目标大小进行变化,在目标较远时,检测框与 帧数 目标真实范围重合率较大。从表4可以看出本文 图83种算法在Camera1视频中的中心误差曲线 的算法的平均中心误差较小。因此从整体来看本 Fig.8 The center error of three tracking algorithms on 文算法在该数据集上优于其他两种算法。图8~9 camera 20r 是3种算法在EPLF-campus44数据集中两个视角 的中心误差变化趋势。 15 表33个跟踪算法在EPLF-campus.4上的平均重叠率 Table 3 The average overlap rate of 3 tracking algorithms on EPLF-campus4 视角 MDP☒ CMOTO 本文方法 5 Cameray 0.79 0.83 0.89 Camera 0.74 0.79 0.82 2 68 10214161820210 表43个跟踪算法在EPLF-campus4上的平均中心误差 帧数 Table 4 Average center error of 3 tracking algorithms on 图93种算法在Camera2视频中的中心误差曲线 EPLF-campus4 Fig.9 The center error of three tracking algorithms on 视角 MDPl②I CMOTIIO 本文方法 cameraz Camera 9.6 7.1 5.1 在EPLF-campus44数据集上Camera,和Cam- Cameraz 9.5 6.9 5.9 era2的典型帧跟踪结果分别如图10~I1所示。同2.2 在 EPLF-campus4 数据集上的实验结果 本文算法与 MDP 算法、CMOT 算法在 EPLFcampus4 数据集上的平均重叠率结果对比如表 3 所示。表 4 为 3 个跟踪器在 EPLF-campus4 数据 集上的平均中心位置误差。从表 3 中看出,相比 其他两种算法,本文算法在 Camera1 中的重叠率 更高,而在 Camera2 中的重叠率较低于 CMOT 算 法,其原因是在 CMOT 算法中目标跟踪框不会随 着目标大小进行变化,在目标较远时,检测框与 目标真实范围重合率较大。从表 4 可以看出本文 的算法的平均中心误差较小。因此从整体来看本 文算法在该数据集上优于其他两种算法。图 8~9 是 3 种算法在 EPLF-campus4 数据集中两个视角 的中心误差变化趋势。 在 EPLF-campus4 数据集上 Camera1 和 Camera2 的典型帧跟踪结果分别如图 10~11 所示。同 (a) F005 (正常帧) (b) F020 (目标部分 遮挡) (c) F035 (目标完全 遮挡) (d) F106 (目标部分 消失) (e) F116 (目标完全 消失) 图 7 本文算法在 BJMOT 数据集第 2 个视角视频中的分步实验结果 Fig. 7 The experimental results of ours algorithm in the in the second video sequences of BJMOT datasets 2 5 10 15 20 本文方法 CMOT MDP 4 6 8 10 12 帧数 中心误差 14 16 18 20 22 ×10 图 8 3 种算法在 Camera1 视频中的中心误差曲线 Fig. 8 The center error of three tracking algorithms on camera1 2 0 5 10 15 20 4 6 8 10 12 帧数 中心误差 14 16 18 20 22 ×10 图 9 3 种算法在 Camera2 视频中的中心误差曲线 Fig. 9 The center error of three tracking algorithms on camera2 表 3 3 个跟踪算法在 EPLF-campus4 上的平均重叠率 Table 3 The average overlap rate of 3 tracking algorithms on EPLF-campus4 视角 MDP[12] CMOT[10] 本文方法 Camera1 0.79 0.83 0.89 Camera2 0.74 0.79 0.82 表 4 3 个跟踪算法在 EPLF-campus4 上的平均中心误差 Table 4 Average center error of 3 tracking algorithms on EPLF-campus4 视角 MDP[12] CMOT[10] 本文方法 Camera1 9.6 7.1 5.1 Camera2 9.5 6.9 5.9 第 2 期 欧伟奇,等:一种基于 Multi-Egocentric 视频运动轨迹重建的多目标跟踪算法 ·251·