正在加载图片...
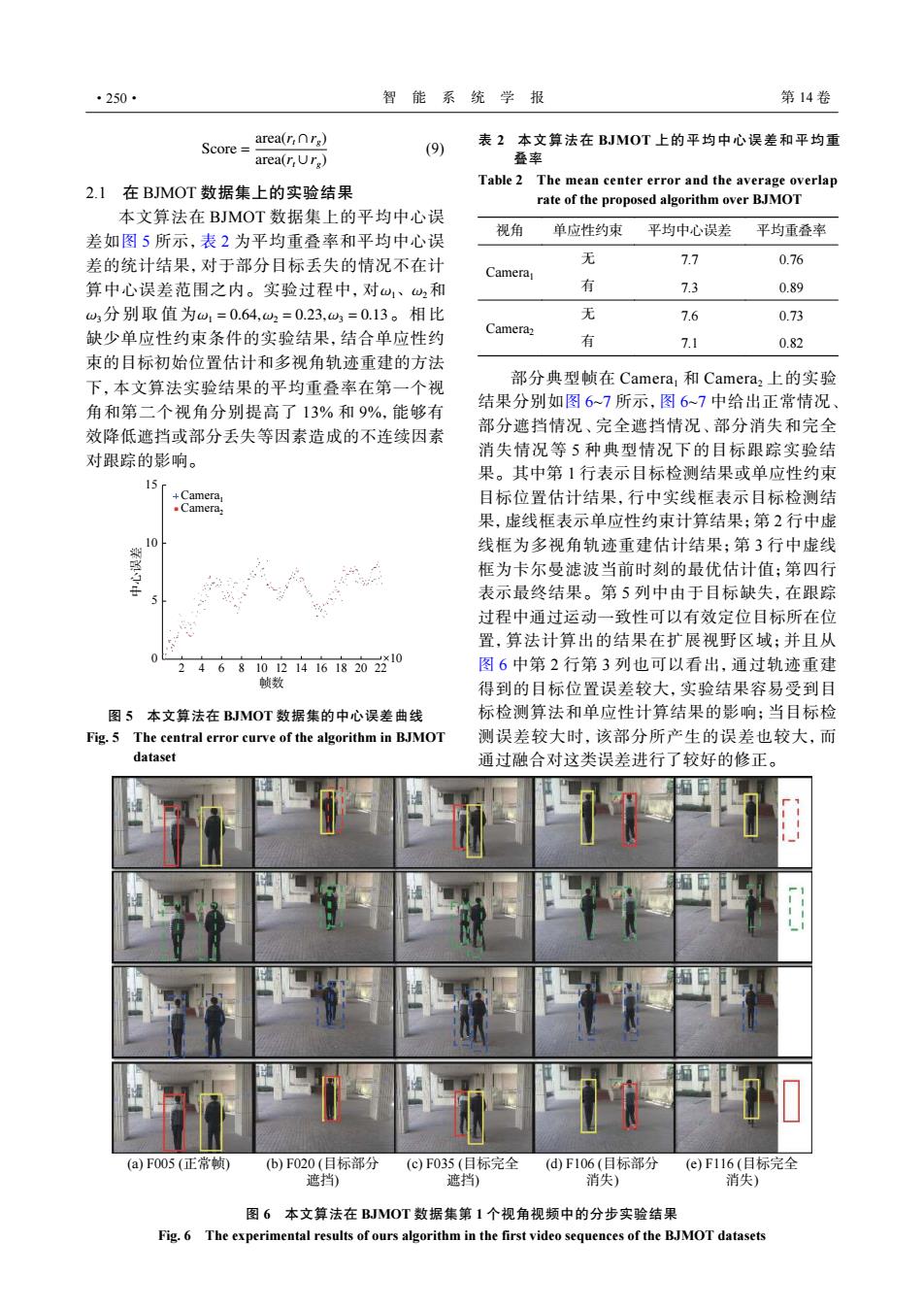
·250· 智能系 统学报 第14卷 area(r,nrg) Score= (9) 表2本文算法在BJMOT上的平均中心误差和平均重 area(r,Urg) 叠率 Table 2 The mean center error and the average overlap 2.1在BMOT数据集上的实验结果 rate of the proposed algorithm over BJMOT 本文算法在BJMOT数据集上的平均中心误 视角 单应性约束 平均中心误差 平均重叠率 差如图5所示,表2为平均重叠率和平均中心误 差的统计结果,对于部分目标丢失的情况不在计 无 7.7 0.76 Camera 算中心误差范围之内。实验过程中,对、ω2和 有 7.3 0.89 3分别取值为w1=0.64,2=0.23,=0.13。相比 无 7.6 0.73 缺少单应性约束条件的实验结果,结合单应性约 有 7.1 0.82 束的目标初始位置估计和多视角轨迹重建的方法 下,本文算法实验结果的平均重叠率在第一个视 部分典型帧在Camera,和Camera2上的实验 角和第二个视角分别提高了13%和9%,能够有 结果分别如图6~7所示,图6~7中给出正常情况、 效降低遮挡或部分丢失等因素造成的不连续因素 部分遮挡情况、完全遮挡情况、部分消失和完全 对跟踪的影响。 消失情况等5种典型情况下的目标跟踪实验结 果。其中第1行表示目标检测结果或单应性约束 15 +Camera, 目标位置估计结果,行中实线框表示目标检测结 .Camera, 果,虚线框表示单应性约束计算结果;第2行中虚 线框为多视角轨迹重建估计结果;第3行中虚线 框为卡尔曼滤波当前时刻的最优估计值;第四行 5 表示最终结果。第5列中由于目标缺失,在跟踪 过程中通过运动一致性可以有效定位目标所在位 置,算法计算出的结果在扩展视野区域;并且从 0 4 68102141618202210 图6中第2行第3列也可以看出,通过轨迹重建 帧数 得到的目标位置误差较大,实验结果容易受到目 图5本文算法在BJMOT数据集的中心误差曲线 标检测算法和单应性计算结果的影响;当目标检 Fig.5 The central error curve of the algorithm in BJMOT 测误差较大时,该部分所产生的误差也较大,而 dataset 通过融合对这类误差进行了较好的修正。 7 (a)F005(正常帧) (b)F020(目标部分 (c)F035(目标完全 (d)F106(目标部分 (e)F116(目标完全 遮挡) 遮挡) 消失) 消失) 图6本文算法在BJMOT数据集第1个视角视频中的分步实验结果 Fig.6 The experimental results of ours algorithm in the first video sequences of the BJMOT datasetsScore = area(rt ∩rg) area(rt ∪rg) (9) 2.1 在 BJMOT 数据集上的实验结果 ω1、ω2 ω3 ω1 = 0.64,ω2 = 0.23,ω3 = 0.13 本文算法在 BJMOT 数据集上的平均中心误 差如图 5 所示,表 2 为平均重叠率和平均中心误 差的统计结果,对于部分目标丢失的情况不在计 算中心误差范围之内。实验过程中,对 和 分别取值为 。相比 缺少单应性约束条件的实验结果,结合单应性约 束的目标初始位置估计和多视角轨迹重建的方法 下,本文算法实验结果的平均重叠率在第一个视 角和第二个视角分别提高了 13% 和 9%,能够有 效降低遮挡或部分丢失等因素造成的不连续因素 对跟踪的影响。 部分典型帧在 Camera1 和 Camera2 上的实验 结果分别如图 6~7 所示,图 6~7 中给出正常情况、 部分遮挡情况、完全遮挡情况、部分消失和完全 消失情况等 5 种典型情况下的目标跟踪实验结 果。其中第 1 行表示目标检测结果或单应性约束 目标位置估计结果,行中实线框表示目标检测结 果,虚线框表示单应性约束计算结果;第 2 行中虚 线框为多视角轨迹重建估计结果;第 3 行中虚线 框为卡尔曼滤波当前时刻的最优估计值;第四行 表示最终结果。第 5 列中由于目标缺失,在跟踪 过程中通过运动一致性可以有效定位目标所在位 置,算法计算出的结果在扩展视野区域;并且从 图 6 中第 2 行第 3 列也可以看出,通过轨迹重建 得到的目标位置误差较大,实验结果容易受到目 标检测算法和单应性计算结果的影响;当目标检 测误差较大时,该部分所产生的误差也较大,而 通过融合对这类误差进行了较好的修正。 2 0 5 10 15 Camera1 Camera2 4 6 8 10 12 帧数 中心误差 14 16 18 20 22 ×10 图 5 本文算法在 BJMOT 数据集的中心误差曲线 Fig. 5 The central error curve of the algorithm in BJMOT dataset (a) F005 (正常帧) (b) F020 (目标部分 遮挡) (c) F035 (目标完全 遮挡) (d) F106 (目标部分 消失) (e) F116 (目标完全 消失) 图 6 本文算法在 BJMOT 数据集第 1 个视角视频中的分步实验结果 Fig. 6 The experimental results of ours algorithm in the first video sequences of the BJMOT datasets 表 2 本文算法在 BJMOT 上的平均中心误差和平均重 叠率 Table 2 The mean center error and the average overlap rate of the proposed algorithm over BJMOT 视角 单应性约束 平均中心误差 平均重叠率 Camera1 无 7.7 0.76 有 7.3 0.89 Camera2 无 7.6 0.73 有 7.1 0.82 ·250· 智 能 系 统 学 报 第 14 卷