正在加载图片...
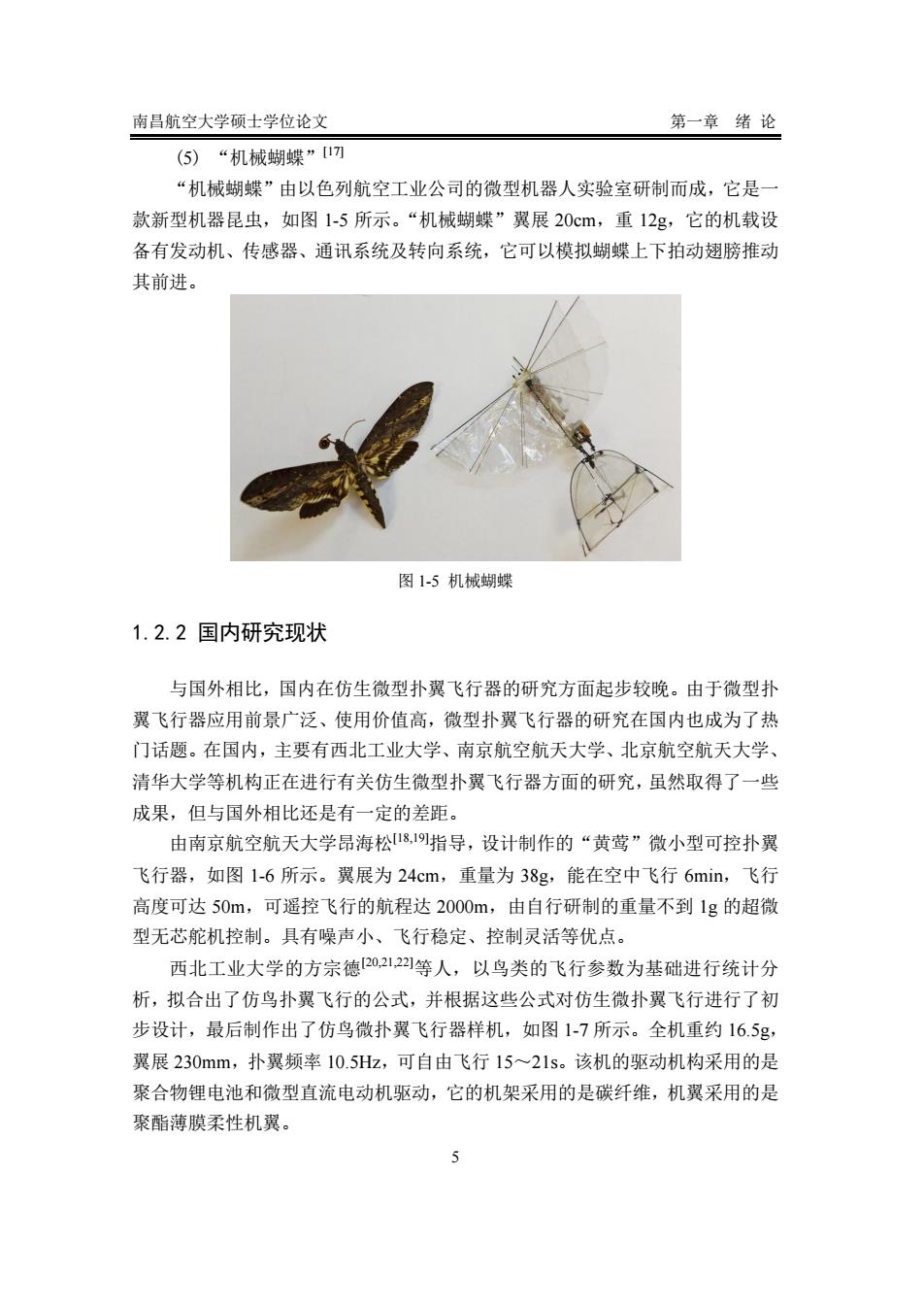
南昌航空大学硕士学位论文 第一章绪论 (⑤)“机械蝴蝶”[17 “机械蝴蝶”由以色列航空工业公司的微型机器人实验室研制而成,它是一 款新型机器昆虫,如图1-5所示。“机械蝴蝶”翼展20cm,重12g,它的机载设 备有发动机、传感器、通讯系统及转向系统,它可以模拟蝴蝶上下拍动翅膀推动 其前进。 图1-5机械蝴蝶 1.2.2国内研究现状 与国外相比,国内在仿生微型扑翼飞行器的研究方面起步较晚。由于微型扑 翼飞行器应用前景广泛、使用价值高,微型扑翼飞行器的研究在国内也成为了热 门话题。在国内,主要有西北工业大学、南京航空航天大学、北京航空航天大学、 清华大学等机构正在进行有关仿生微型扑翼飞行器方面的研究,虽然取得了一些 成果,但与国外相比还是有一定的差距。 由南京航空航天大学昂海松8,1判指导,设计制作的“黄莺”微小型可控扑翼 飞行器,如图1-6所示。翼展为24cm,重量为38g,能在空中飞行6min,飞行 高度可达50m,可遥控飞行的航程达2000m,由自行研制的重量不到1g的超微 型无芯舵机控制。具有噪声小、飞行稳定、控制灵活等优点。 西北工业大学的方宗德20,21,2等人,以鸟类的飞行参数为基础进行统计分 析,拟合出了仿鸟扑翼飞行的公式,并根据这些公式对仿生微扑翼飞行进行了初 步设计,最后制作出了仿鸟微扑翼飞行器样机,如图1-7所示。全机重约16.5g, 翼展230mm,扑翼频率10.5Hz,可自由飞行15~21s。该机的驱动机构采用的是 聚合物锂电池和微型直流电动机驱动,它的机架采用的是碳纤维,机翼采用的是 聚酯薄膜柔性机翼。南昌航空大学硕士学位论文 第一章 绪 论 5 (5) “机械蝴蝶”[17] “机械蝴蝶”由以色列航空工业公司的微型机器人实验室研制而成,它是一 款新型机器昆虫,如图 1-5 所示。“机械蝴蝶”翼展 20cm,重 12g,它的机载设 备有发动机、传感器、通讯系统及转向系统,它可以模拟蝴蝶上下拍动翅膀推动 其前进。 图 1-5 机械蝴蝶 1.2.2 国内研究现状 与国外相比,国内在仿生微型扑翼飞行器的研究方面起步较晚。由于微型扑 翼飞行器应用前景广泛、使用价值高,微型扑翼飞行器的研究在国内也成为了热 门话题。在国内,主要有西北工业大学、南京航空航天大学、北京航空航天大学、 清华大学等机构正在进行有关仿生微型扑翼飞行器方面的研究,虽然取得了一些 成果,但与国外相比还是有一定的差距。 由南京航空航天大学昂海松[18,19] 指导,设计制作的“黄莺”微小型可控扑翼 飞行器,如图 1-6 所示。翼展为 24cm,重量为 38g,能在空中飞行 6min,飞行 高度可达 50m,可遥控飞行的航程达 2000m,由自行研制的重量不到 1g 的超微 型无芯舵机控制。具有噪声小、飞行稳定、控制灵活等优点。 西北工业大学的方宗德[20,21,22] 等人,以鸟类的飞行参数为基础进行统计分 析,拟合出了仿鸟扑翼飞行的公式,并根据这些公式对仿生微扑翼飞行进行了初 步设计,最后制作出了仿鸟微扑翼飞行器样机,如图 1-7 所示。全机重约 16.5g, 翼展 230mm,扑翼频率 10.5Hz,可自由飞行 15~21s。该机的驱动机构采用的是 聚合物锂电池和微型直流电动机驱动,它的机架采用的是碳纤维,机翼采用的是 聚酯薄膜柔性机翼