正在加载图片...
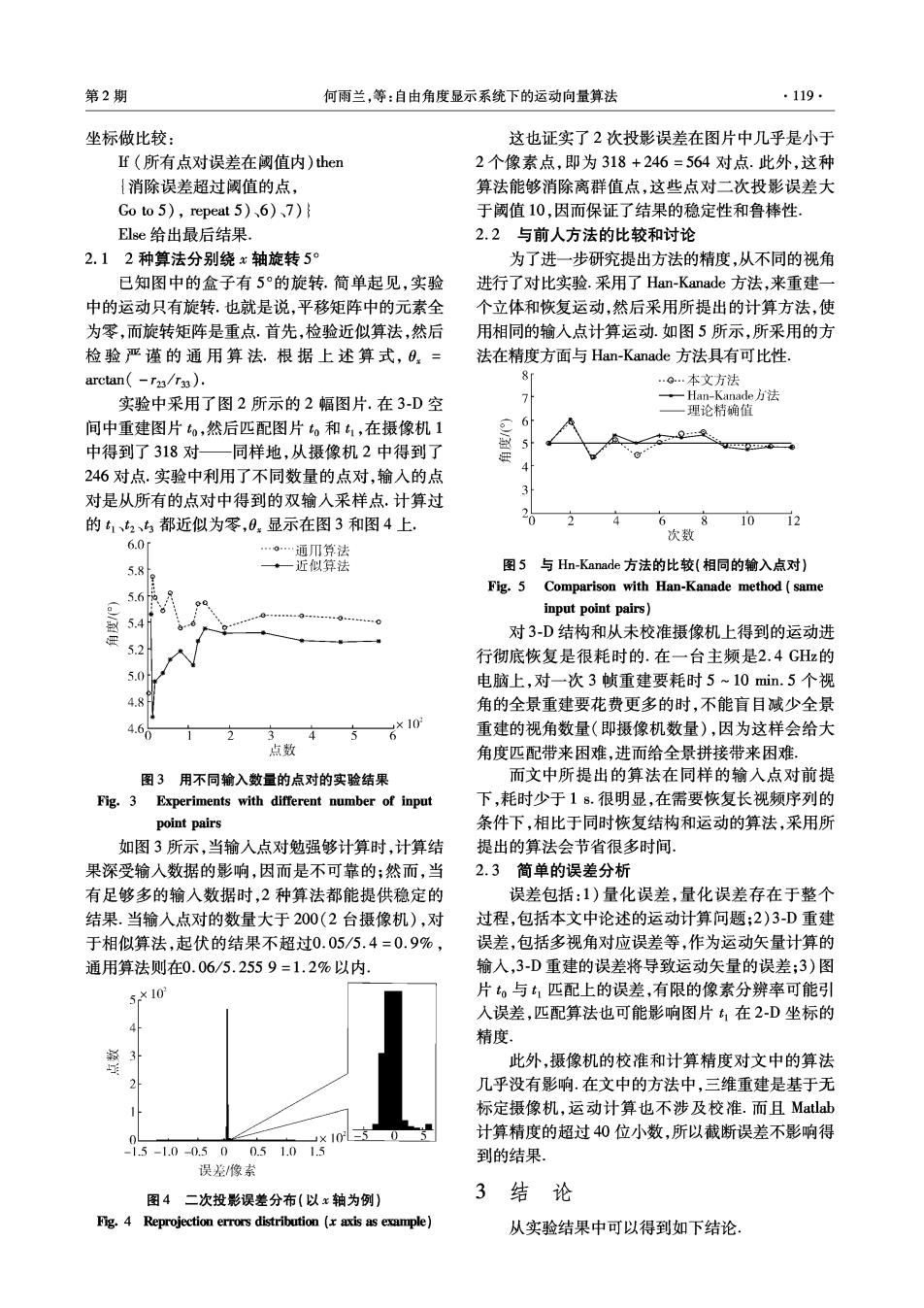
第2期 何雨兰,等:自由角度显示系统下的运动向量算法 ·119 坐标做比较: 这也证实了2次投影误差在图片中几乎是小于 f(所有点对误差在阈值内)then 2个像素点,即为318+246=564对点.此外,这种 {消除误差超过阂值的点, 算法能够消除离群值点,这些点对二次投影误差大 Goto5),repeat5)、6)、7)i 于阈值10,因而保证了结果的稳定性和鲁棒性, Else给出最后结果. 2.2与前人方法的比较和讨论 2.12种算法分别绕x轴旋转5° 为了进一步研究提出方法的精度,从不同的视角 已知图中的盒子有5°的旋转.简单起见,实验 进行了对比实验.采用了Han-Kanade方法,来重建一 中的运动只有旋转,也就是说,平移矩阵中的元素全 个立体和恢复运动,然后采用所提出的计算方法,使 为零,而旋转矩阵是重点.首先,检验近似算法,然后 用相同的输入点计算运动.如图5所示,所采用的方 检验严谨的通用算法.根据上述算式,日,= 法在精度方面与Han-Kanade方法具有可比性, arctan(-r2a/r3). .。…本文方法 实验中采用了图2所示的2幅图片.在3-D空 一Han-Kanade方法 -理论精确值 间中重建图片,然后匹配图片和t1,在摄像机1 中得到了318对一同样地,从摄像机2中得到了 246对点.实验中利用了不同数量的点对,输入的点 对是从所有的点对中得到的双输入采样点.计算过 2 的1、都近似为零,0显示在图3和图4上. 6 81012 次数 6.0 …o…通兀法 5.8 *一近似算法 图5与Hn-Kanade方法的比较(相同的输入点对)】 9 Fig.5 Comparison with Han-Kanade method(same 5.6 input point pairs)】 54 对3D结构和从未校准摄像机上得到的运动进 八3 行彻底恢复是很耗时的.在一台主频是2.4GHz的 电脑上,对一次3帧重建要耗时5~10min.5个视 4.8 角的全景重建要花费更多的时,不能盲目诚少全景 460 3 4 6*10 重建的视角数量(即摄像机数量),因为这样会给大 点数 角度匹配带来困难,进而给全景拼接带来困难。 图3用不同输入数量的点对的实骏验结果 而文中所提出的算法在同样的输入点对前提 Fig.3 Experiments with different number of input 下,耗时少于18.很明显,在需要恢复长视频序列的 point pairs 条件下,相比于同时恢复结构和运动的算法,采用所 如图3所示,当输入点对勉强够计算时,计算结 提出的算法会节省很多时间 果深受输入数据的影响,因而是不可靠的:然而,当 2.3简单的误差分析 有足够多的输入数据时,2种算法都能提供稳定的 误差包括:1)量化误差,量化误差存在于整个 结果.当输入点对的数量大于200(2台摄像机),对 过程,包括本文中论述的运动计算问题;2)3-D重建 于相似算法,起伏的结果不超过0.05/5.4=0.9%, 误差,包括多视角对应误差等,作为运动矢量计算的 通用算法则在0.06/5.2559=1.2%以内 输入,3-D重建的误差将导致运动矢量的误差:3)图 10 片。与t,匹配上的误差,有限的像素分辨率可能引 入误差,匹配算法也可能影响图片t1在2-D坐标的 精度 此外,摄像机的校准和计算精度对文中的算法 17 几乎没有影响.在文中的方法中,三维重建是基于无 标定摄像机,运动计算也不涉及校准.而且Matlab ux 10 计算精度的超过40位小数,所以截断误差不影响得 -1.5-1.0-0.500.51.01.5 到的结果. 误差/像茶 图4二次投影误差分布(以x轴为例) 3结论 Fig.4 Reprojection errors distribution (x axis as example) 从实验结果中可以得到如下结论