正在加载图片...
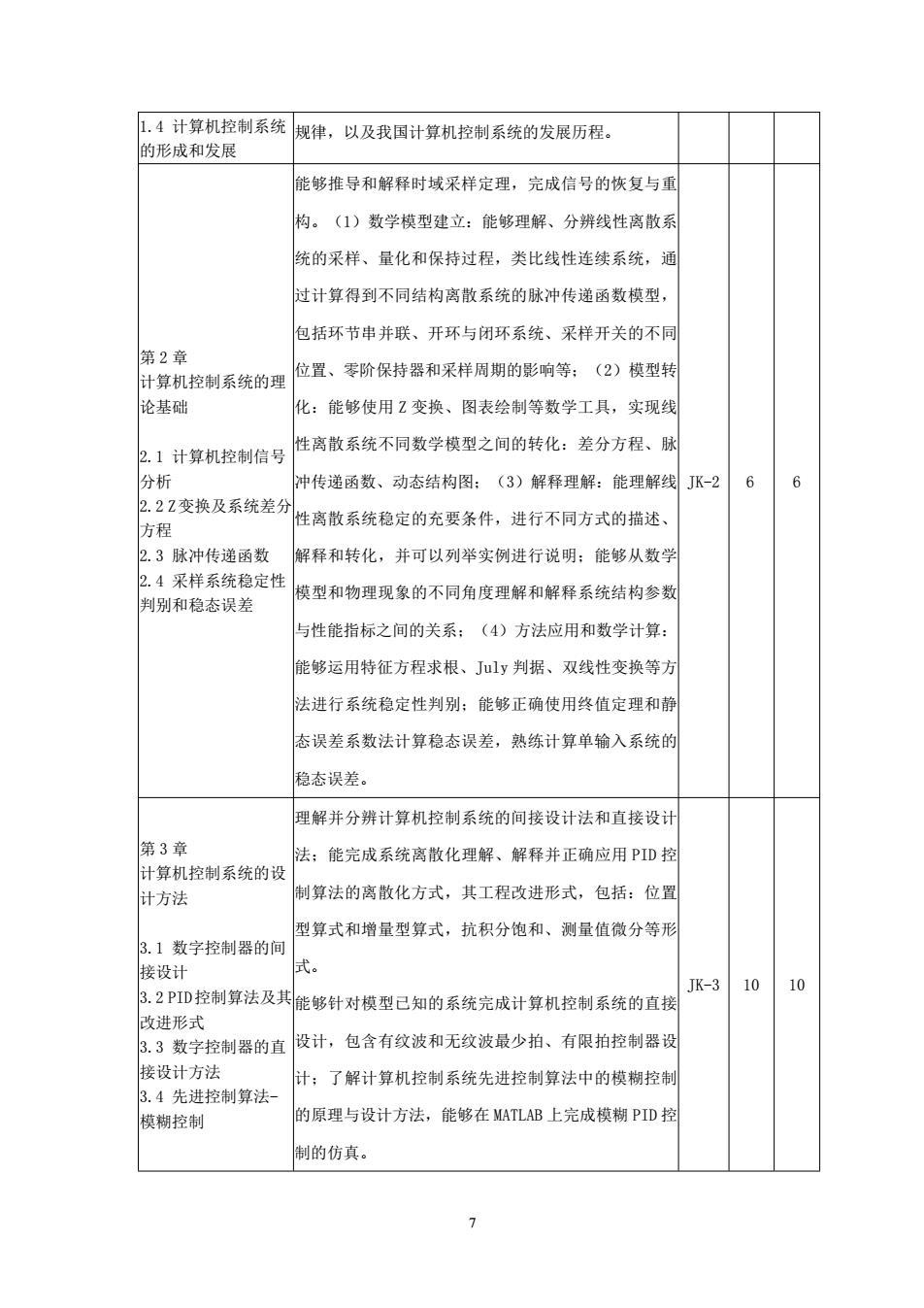
.4计算机控制系统规律,以及我国计算机控制系统的发展历程。 的形成和发展 能够推导和解释时域采样定理,完成信号的恢复与重 构。(1)数学模型建立:能够理解、分辨线性离散系 统的采样、量化和保持过程,类比线性连续系统,通 过计算得到不同结构离散系统的脉冲传递函数模型, 包括环节串并联、开环与闭环系统、采样开关的不同 第2章 计算机控制系统的理 位置、零阶保持器和采样周期的影响等;(2)模型转 论基础 化:能够使用变换、图表绘制等数学工具,实现线 2.1计算机控制信号 性离散系统不同数学模型之间的转化:差分方程、脉 中传递函数、动态结构图:(3)解释理解:能理解线K-2 6 性离散系统稳定的充要条件,进行不同方式的描述、 方程 2.3脉冲传递函数 解释和转化,并可以列举实例进行说明:能够从数学 2.4采样系密稳定性 判别和稳态误差 模型和物理现象的不同角度理解和解释系统结构参数 与性能指标之间的关系:(4)方法应用和数学计算: 能够运用特征方程求根、J加ly判据、双线性变换等方 法进行系统稳定性判别:能够正确使用终值定理和静 态误差系数法计算稳态误差,熟练计算单输入系统的 稳态误差。 理解并分辨计算机控制系统的间接设计法和直接设计 第3章 法:能完成系统离散化理解、解释并正确应用PID控 计算机控制系统的设 计方法 制算法的离散化方式,其工程改进形式,包括:位置 型算式和增量型算式,抗积分饱和、测量值微分等形 3.1数字控制器的间 接设计 3.2PID控制算法及其能够针对模型已知的系统完成计算机控制系统的直接 JK-31010 改进形式 3.3数字控制器的直设计,包含有纹波和无纹波最少拍、有限拍控制器设 接设计方法 计:了解计算机控制系统先进控制算法中的模糊控制 3.4先进控制算法 模糊控制 的原理与设计方法,能够在MATLAB上完成模糊PID 制的仿真。7 1.4 计算机控制系统 的形成和发展 规律,以及我国计算机控制系统的发展历程。 第 2 章 计算机控制系统的理 论基础 2.1 计算机控制信号 分析 2.2 Z变换及系统差分 方程 2.3 脉冲传递函数 2.4 采样系统稳定性 判别和稳态误差 能够推导和解释时域采样定理,完成信号的恢复与重 构。(1)数学模型建立:能够理解、分辨线性离散系 统的采样、量化和保持过程,类比线性连续系统,通 过计算得到不同结构离散系统的脉冲传递函数模型, 包括环节串并联、开环与闭环系统、采样开关的不同 位置、零阶保持器和采样周期的影响等;(2)模型转 化:能够使用 Z 变换、图表绘制等数学工具,实现线 性离散系统不同数学模型之间的转化:差分方程、脉 冲传递函数、动态结构图;(3)解释理解:能理解线 性离散系统稳定的充要条件,进行不同方式的描述、 解释和转化,并可以列举实例进行说明;能够从数学 模型和物理现象的不同角度理解和解释系统结构参数 与性能指标之间的关系;(4)方法应用和数学计算: 能够运用特征方程求根、July 判据、双线性变换等方 法进行系统稳定性判别;能够正确使用终值定理和静 态误差系数法计算稳态误差,熟练计算单输入系统的 稳态误差。 JK-2 6 6 第 3 章 计算机控制系统的设 计方法 3.1 数字控制器的间 接设计 3.2 PID控制算法及其 改进形式 3.3 数字控制器的直 接设计方法 3.4 先进控制算法- 模糊控制 理解并分辨计算机控制系统的间接设计法和直接设计 法;能完成系统离散化理解、解释并正确应用 PID 控 制算法的离散化方式,其工程改进形式,包括:位置 型算式和增量型算式,抗积分饱和、测量值微分等形 式。 能够针对模型已知的系统完成计算机控制系统的直接 设计,包含有纹波和无纹波最少拍、有限拍控制器设 计;了解计算机控制系统先进控制算法中的模糊控制 的原理与设计方法,能够在 MATLAB 上完成模糊 PID 控 制的仿真。 JK-3 10 10