正在加载图片...
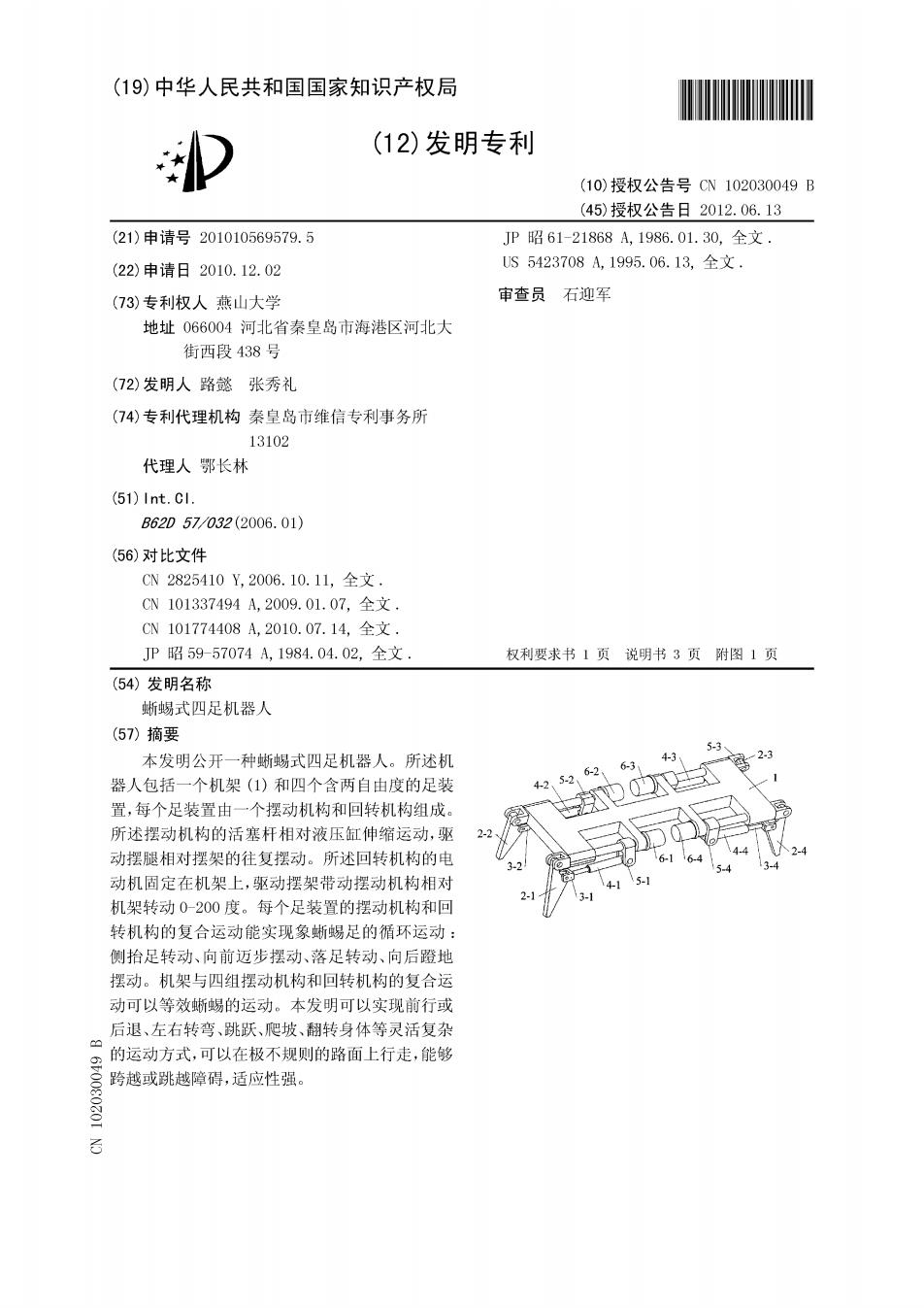
(19)中华人民共和国国家知识产权局 (12)发明专利 (10)授权公告号CN102030049B (45)授权公告日2012.06.13 (21)申请号201010569579.5 JP昭61-21868A,1986.01.30,全文. (22)申请日2010.12.02 US5423708A,1995.06.13,全文. (73)专利权人燕山大学 审查员石迎军 地址066004河北省秦皇岛市海港区河北大 街西段438号 (72)发明人路懿张秀礼 (74)专利代理机构秦皇岛市维信专利事务所 13102 代理人鄂长林 (51)1nt.Cl. B62057032(2006.01) (56)对比文件 CN2825410Y,2006.10.11,全文, CN101337494A,2009.01.07,全文 CN101774408A,2010.07.14,全文. JP昭5957074A,1984.04.02,全文 权利要求书1页说明书3页附图1页 (54)发明名称 蜥蜴式四足机器人 (57)摘要 5-3、 本发明公开一种蜥蜴式四足机器人。所述机 4-3 6-3 23 6-2 器人包括一个机架(1)和四个含两自由度的足装 5.2 4-2 置,每个足装置由一个摆动机构和回转机构组成。 所述摆动机构的活塞杆相对液压缸伸缩运动,驱 2-2 动摆腿相对摆架的往复摆动。所述回转机构的电 3-2 动机固定在机架上,驱动摆架带动摆动机构相对 2- 机架转动0-200度。每个足装置的摆动机构和回 转机构的复合运动能实现象蜥蜴足的循环运动: 侧拾足转动、向前迈步摆动、落足转动、向后蹬地 摆动。机架与四组摆动机构和回转机构的复合运 动可以等效蜥蜴的运动。本发明可以实现前行或 后退、左右转弯、跳跃、爬坡、翻转身体等灵活复杂 的运动方式,可以在极不规侧的路面上行走,能够 跨越或跳越障碍,适应性强