正在加载图片...
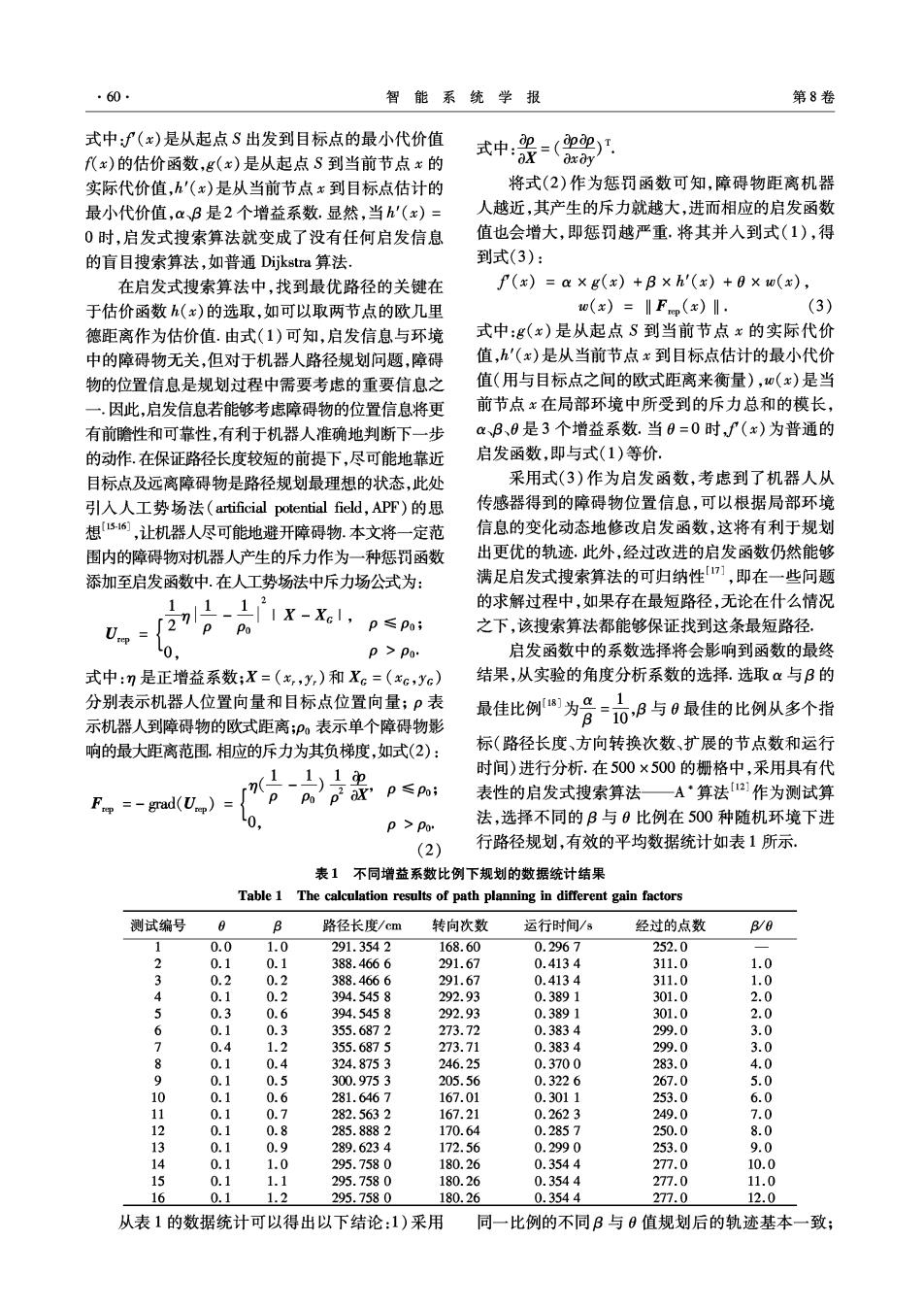
·60 智能系统学报 第8卷 式中:f(x)是从起点S出发到目标点的最小代价值 式中:2=(22) f代x)的估价函数,g(x)是从起点S到当前节点x的 aX-、x0y 实际代价值,h'(x)是从当前节点x到目标点估计的 将式(2)作为惩罚函数可知,障碍物距离机器 最小代价值,αB是2个增益系数.显然,当h'(x)= 人越近,其产生的斥力就越大,进而相应的启发函数 0时,启发式搜索算法就变成了没有任何启发信息 值也会增大,即惩罚越严重.将其并入到式(1),得 的盲目搜索算法,如普通Dijkstra算法. 到式(3): 在启发式搜索算法中,找到最优路径的关键在 f(x)=a×g(x)+B×h'(x)+0×w(x), 于估价函数h(x)的选取,如可以取两节点的欧几里 0(x)=‖Fp(x)‖. (3) 德距离作为估价值.由式(1)可知,启发信息与环境 式中:g(x)是从起点S到当前节点x的实际代价 中的障碍物无关,但对于机器人路径规划问题,障碍 值,'(x)是从当前节点x到目标点估计的最小代价 物的位置信息是规划过程中需要考虑的重要信息之 值(用与目标点之间的欧式距离来衡量),w(x)是当 一,因此,启发信息若能够考虑障碍物的位置信息将更 前节点x在局部环境中所受到的斥力总和的模长, 有前瞻性和可靠性,有利于机器人准确地判断下一步 aB、0是3个增益系数.当0=0时,f(x)为普通的 的动作.在保证路径长度较短的前提下,尽可能地靠近 启发函数,即与式(1)等价. 目标点及远离障碍物是路径规划最理想的状态,此处 采用式(3)作为启发函数,考虑到了机器人从 引入人工势场法(artificial potential field,APF)的思 传感器得到的障碍物位置信息,可以根据局部环境 想516,让机器人尽可能地避开障碍物.本文将一定范 信息的变化动态地修改启发函数,这将有利于规划 围内的障碍物对机器人产生的斥力作为一种惩罚函数 出更优的轨迹.此外,经过改进的启发函数仍然能够 添加至启发函数中.在人工势场法中斥力场公式为: 满足启发式搜索算法的可归纳性],即在一些问题 1 1-11x-X1, 2 的求解过程中,如果存在最短路径,无论在什么情况 Up 27 p Po p≤Pn: 之下,该搜索算法都能够保证找到这条最短路径. P Po. 启发函数中的系数选择将会影响到函数的最终 式中:m是正增益系数;X=(x,y,)和Xc=(xc,yc) 结果,从实验的角度分析系数的选择.选取α与B的 分别表示机器人位置向量和目标点位置向量;P表 最佳比例为骨=0B与日最佳的比例从多个指 1 示机器人到障碍物的欧式距离;表示单个障碍物影 响的最大距离范围相应的斥力为其负梯度,如式(2): 标(路径长度、方向转换次数、扩展的节点数和运行 1 111p 时间)进行分析.在500×500的栅格中,采用具有代 aK” p≤pn; 表性的启发式搜索算法一A·算法2]作为测试算 F=-grad(Up Po P Po 法,选择不同的B与日比例在500种随机环境下进 (2) 行路径规划,有效的平均数据统计如表1所示。 表1不同增益系数比例下规划的数据统计结果 Table 1 The calculation results of path planning in different gain factors 测试编号 8 路径长度/cm 转向次数 运行时间/3 经过的点数 B/0 1 0.0 1.0 291.3542 168.60 0.2967 252.0 2 0.1 0.1 388.4666 291.67 0.4134 311.0 1.0 3 0.2 0.2 388.4666 291.67 0.4134 311.0 1.0 0.1 0.2 394.5458 292.93 0.3891 301.0 2.0 0.3 0.6 394.5458 292.93 0.3891 301.0 2.0 6 0.1 0.3 355.6872 273.72 0.3834 299.0 3.0 > 0.4 1.2 355.6875 273.71 0.3834 299.0 3.0 0.1 0.4 324.8753 246.25 0.3700 283.0 4.0 0.1 0.5 300.9753 205.56 0.3226 267.0 5.0 o 0.1 0.6 281.6467 167.01 0.3011 253.0 6.0 0.1 0.7 282.5632 167.21 0.2623 249.0 7.0 1 0.1 0.8 285.8882 170.64 0.2857 250.0 8.0 0.1 0.9 289.6234 172.56 0.2990 253.0 9.0 1 0.1 1.0 295.7580 180.26 0.3544 277.0 10.0 0.1 1.1 295.7580 180.26 0.3544 277.0 11.0 16 0.1 1.2 295.7580 180.26 0.3544 277.0 12.0 从表1的数据统计可以得出以下结论:1)采用 同一比例的不同B与0值规划后的轨迹基本一致;