正在加载图片...
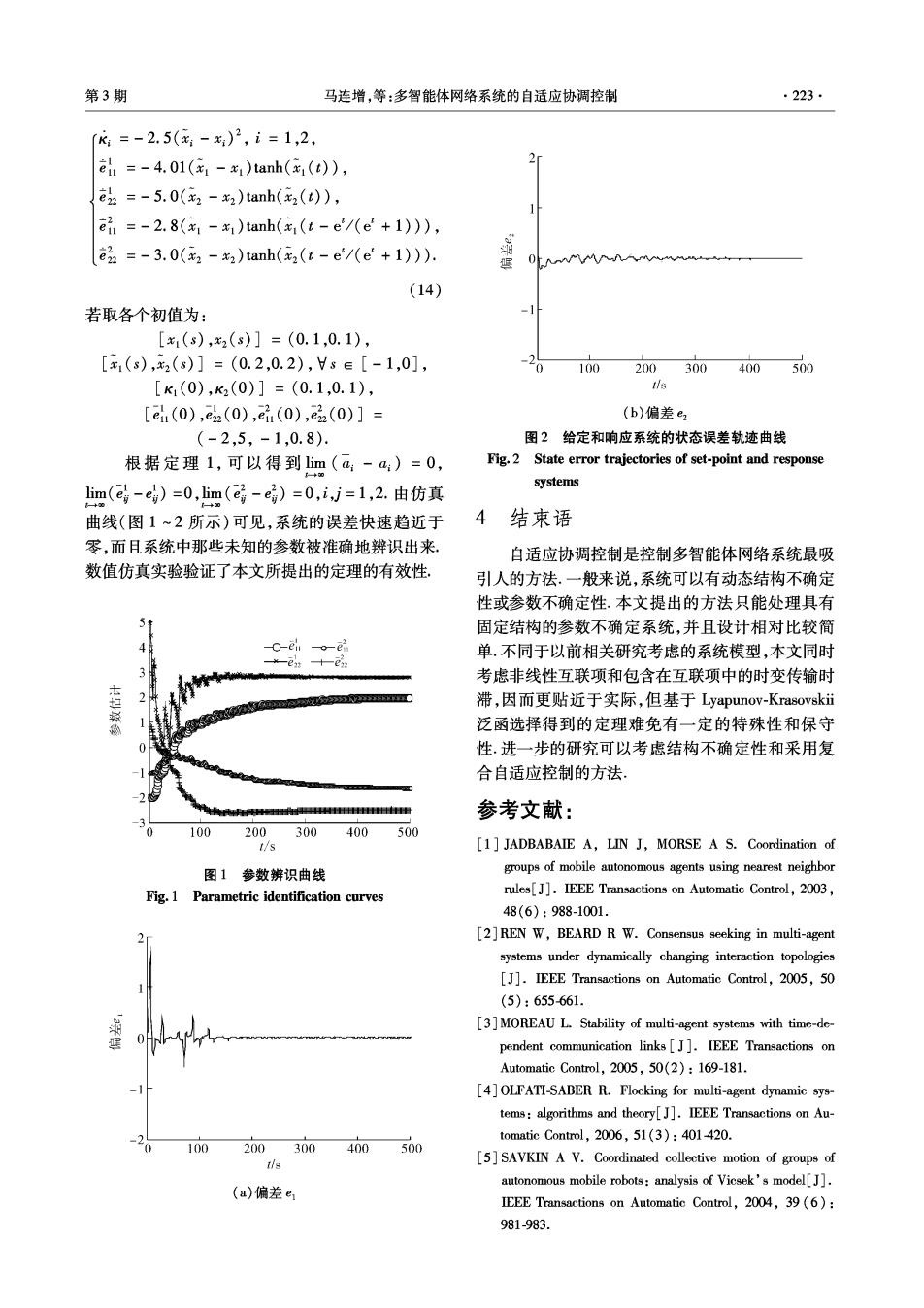
第3期 马连增,等:多智能体网络系统的自适应协调控制 ·223 K=-2.5(-x)2,i=1,2, e=-4.01(x-x)anh(x(c)), 2 e2=-5.0(2-x)tanh((t), e品:=-2.8(-x)tanh(x,(t-e/(e+l)), e2=-3.0(x2-x2)tanh((t-e/(e+1)). MMA (14) 若取各个初值为: [x(s),x2(s)]=(0.1,0.1), [x(s),x2(s)]=(0.2,0.2),s∈[-1,0], 0 100 200300 400 500 [k1(0),k2(0)]=(0.1,0.1), [e(0),e22(0),e(0),e2(0)]= (b)偏差e2 (-2,5,-1,0.8). 图2给定和响应系统的状态误差轨迹曲线 根据定理1,可以得到im(a-a:)=0, Fig.2 State error trajectories of set-point and response systems lim(e-e)=0,im(e-e)=0,i,j=1,2.由仿真 曲线(图1~2所示)可见,系统的误差快速趋近于 4结束语 零,而且系统中那些未知的参数被准确地辨识出来 自适应协调控制是控制多智能体网络系统最吸 数值仿真实验验证了本文所提出的定理的有效性, 引人的方法.一般来说,系统可以有动态结构不确定 性或参数不确定性.本文提出的方法只能处理具有 固定结构的参数不确定系统,并且设计相对比较简 0-e 单.不同于以前相关研究考虑的系统模型,本文同时 考虑非线性互联项和包含在互联项中的时变传输时 滞,因而更贴近于实际,但基于Lyapunov-Krasovskii 泛函选择得到的定理难免有一定的特殊性和保守 性.进一步的研究可以考虑结构不确定性和采用复 合自适应控制的方法. 参考文献: 100 200300 400 500 t/s [1]JADBABAIE A,LIN J,MORSE A S.Coordination of 图1参数辨识曲线 groups of mobile autonomous agents using nearest neighbor Fig.1 Parametric identification curves rules[J].IEEE Transactions on Automatic Control,2003, 48(6):988-1001. [2]REN W,BEARD R W.Consensus seeking in multi-agent systems under dynamically changing interaction topologies [J].IEEE Transactions on Automatic Control,2005,50 (5):655661. [3]MOREAU L.Stability of multi-agent systems with time-de- pendent communication links[J].IEEE Transactions on Automatic Control,2005,50(2):169-181. [4]OLFATI-SABER R.Flocking for multi-agent dynamic sys- tems:algorithms and theory[J].IEEE Transactions on Au- tomatic Control,2006,51(3):401-420. 100 200300400500 [5]SAVKIN A V.Coordinated collective motion of groups of autonomous mobile robots:analysis of Vicsek's model[J]. (a)偏差e IEEE Transactions on Automatic Control,2004,39(6): 981-983