正在加载图片...
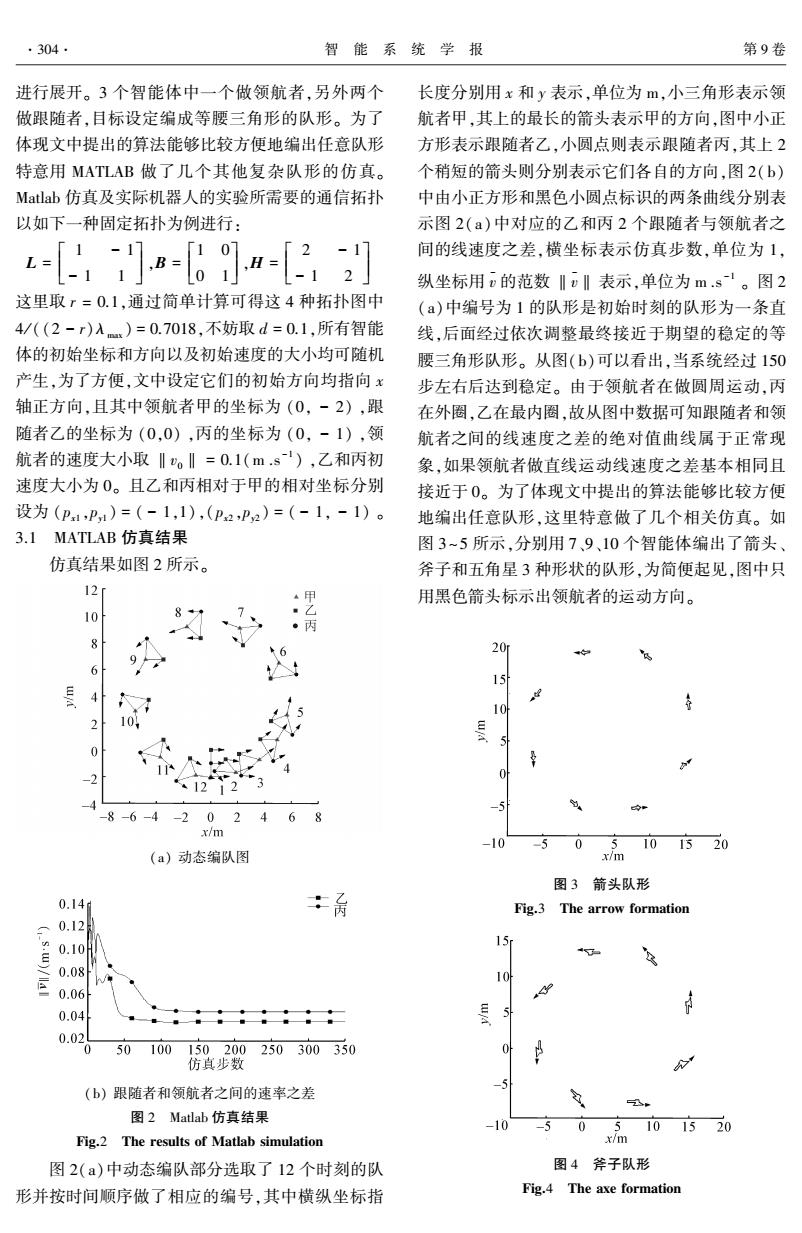
·304. 智能系统学报 第9卷 进行展开。3个智能体中一个做领航者,另外两个 长度分别用x和y表示,单位为m,小三角形表示领 做跟随者,目标设定编成等腰三角形的队形。为了 航者甲,其上的最长的箭头表示甲的方向,图中小正 体现文中提出的算法能够比较方便地编出任意队形 方形表示跟随者乙,小圆点则表示跟随者丙,其上2 特意用MATLAB做了几个其他复杂队形的仿真。 个稍短的箭头则分别表示它们各自的方向,图2(b) Matlab仿真及实际机器人的实验所需要的通信拓扑 中由小正方形和黑色小圆点标识的两条曲线分别表 以如下一种固定拓扑为例进行: 示图2(a)中对应的乙和丙2个跟随者与领航者之 间的线速度之差,横坐标表示仿真步数,单位为1, 纵坐标用的范数It‖表示,单位为m.s1。图2 这里取r=0.1,通过简单计算可得这4种拓扑图中 (a)中编号为1的队形是初始时刻的队形为一条直 4/((2-r)入)=0.7018,不妨取d=0.1,所有智能 线,后面经过依次调整最终接近于期望的稳定的等 体的初始坐标和方向以及初始速度的大小均可随机 腰三角形队形。从图(b)可以看出,当系统经过150 产生,为了方便,文中设定它们的初始方向均指向x 步左右后达到稳定。由于领航者在做圆周运动,丙 轴正方向,且其中领航者甲的坐标为(0,-2),跟 在外圈,乙在最内圈,故从图中数据可知跟随者和领 随者乙的坐标为(0,0),丙的坐标为(0,-1),领 航者之间的线速度之差的绝对值曲线属于正常现 航者的速度大小取‖。‖=0.1(m.s),乙和丙初 象,如果领航者做直线运动线速度之差基本相同且 速度大小为0。且乙和丙相对于甲的相对坐标分别 接近于0。为了体现文中提出的算法能够比较方便 设为(p1P1)=(-1,1),(PaP2)=(-1,-1)。 地编出任意队形,这里特意做了几个相关仿真。如 3.1 MATLAB仿真结果 图3~5所示,分别用7、9、10个智能体编出了箭头、 仿真结果如图2所示。 斧子和五角星3种形状的队形,为简便起见,图中只 12 4甲 用黑色箭头标示出领航者的运动方向。 10 ·乙 ·丙 8 6 20 9 6 15 4 10 10, 0 -5 -202 6 x/m -10 -5 05101520 (a)动态编队图 x/m 图3箭头队形 0.14 Fig.3 The arrow formation 0.12 ((5./=a= 0.10 0.08 10 0.06 0.04 0.02 50100150200250300350 仿真步数 (b)跟随者和领航者之间的速率之差 图2 Matlab仿真结果 10 05 101520 Fig.2 The results of Matlab simulation x/m 图2(a)中动态编队部分选取了12个时刻的队 图4斧子队形 形并按时间顺序做了相应的编号,其中横纵坐标指 Fig.4 The axe formation进行展开。 3 个智能体中一个做领航者,另外两个 做跟随者,目标设定编成等腰三角形的队形。 为了 体现文中提出的算法能够比较方便地编出任意队形 特意用 MATLAB 做了几个其他复杂队形的仿真。 Matlab 仿真及实际机器人的实验所需要的通信拓扑 以如下一种固定拓扑为例进行: L = 1 - 1 - 1 1 é ë ê ê ù û ú ú ,B = 1 0 0 1 é ë ê ê ù û ú ú ,H = 2 - 1 - 1 2 é ë ê ê ù û ú ú 这里取 r = 0.1,通过简单计算可得这 4 种拓扑图中 4 / ((2 - r)λ max) = 0.7018,不妨取 d = 0.1,所有智能 体的初始坐标和方向以及初始速度的大小均可随机 产生,为了方便,文中设定它们的初始方向均指向 x 轴正方向,且其中领航者甲的坐标为 (0, - 2) ,跟 随者乙的坐标为 (0,0) ,丙的坐标为 (0, - 1) ,领 航者的速度大小取 ‖v0‖ = 0.1(m .s -1 ) ,乙和丙初 速度大小为 0。 且乙和丙相对于甲的相对坐标分别 设为 (px1 ,py1 ) = ( - 1,1),(px2 ,py2 ) = ( - 1, - 1) 。 3.1 MATLAB 仿真结果 仿真结果如图 2 所示。 (a) 动态编队图 (b) 跟随者和领航者之间的速率之差 图 2 Matlab 仿真结果 Fig.2 The results of Matlab simulation 图 2(a)中动态编队部分选取了 12 个时刻的队 形并按时间顺序做了相应的编号,其中横纵坐标指 长度分别用 x 和 y 表示,单位为 m,小三角形表示领 航者甲,其上的最长的箭头表示甲的方向,图中小正 方形表示跟随者乙,小圆点则表示跟随者丙,其上 2 个稍短的箭头则分别表示它们各自的方向,图 2(b) 中由小正方形和黑色小圆点标识的两条曲线分别表 示图 2(a)中对应的乙和丙 2 个跟随者与领航者之 间的线速度之差,横坐标表示仿真步数,单位为 1, 纵坐标用 v - 的范数 ‖v -‖ 表示,单位为 m .s -1 。 图 2 (a)中编号为 1 的队形是初始时刻的队形为一条直 线,后面经过依次调整最终接近于期望的稳定的等 腰三角形队形。 从图(b)可以看出,当系统经过 150 步左右后达到稳定。 由于领航者在做圆周运动,丙 在外圈,乙在最内圈,故从图中数据可知跟随者和领 航者之间的线速度之差的绝对值曲线属于正常现 象,如果领航者做直线运动线速度之差基本相同且 接近于 0。 为了体现文中提出的算法能够比较方便 地编出任意队形,这里特意做了几个相关仿真。 如 图 3~5 所示,分别用 7、9、10 个智能体编出了箭头、 斧子和五角星 3 种形状的队形,为简便起见,图中只 用黑色箭头标示出领航者的运动方向。 图 3 箭头队形 Fig.3 The arrow formation 图 4 斧子队形 Fig.4 The axe formation ·304· 智 能 系 统 学 报 第 9 卷