正在加载图片...
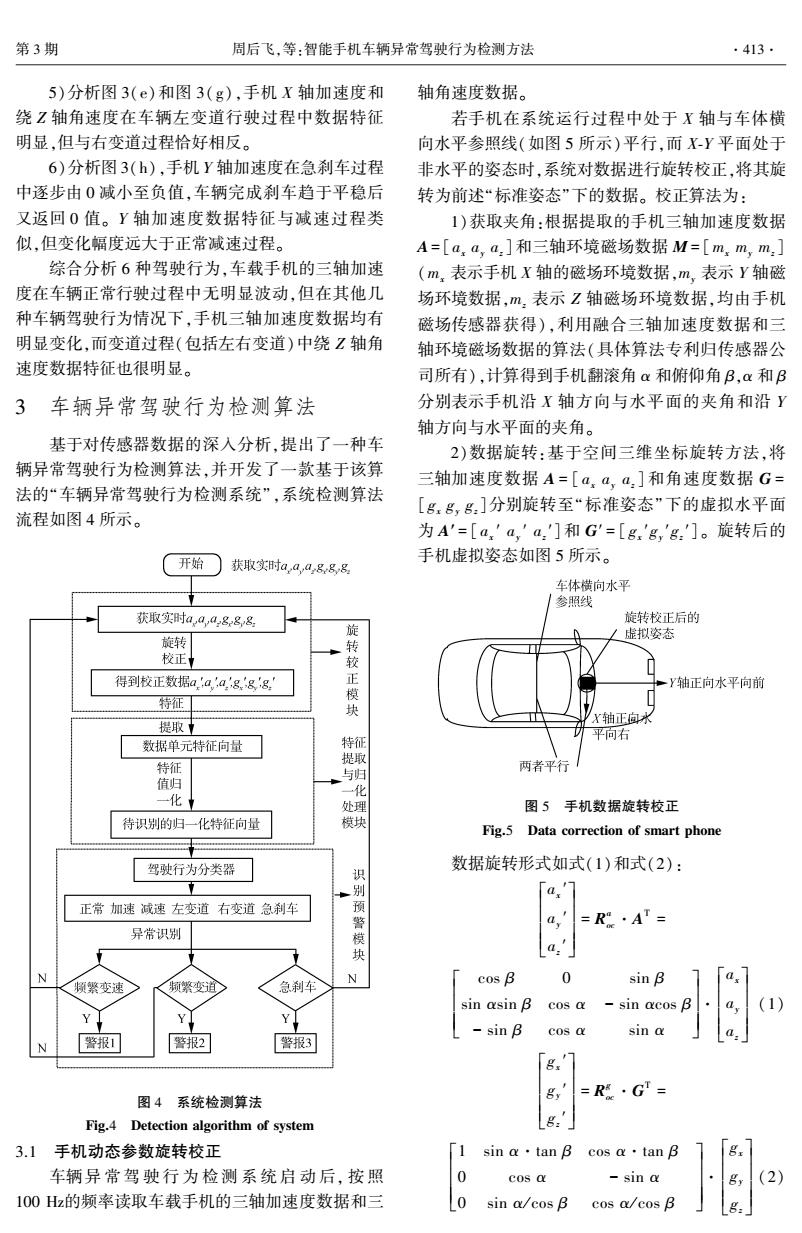
第3期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·413. 5)分析图3(e)和图3(g),手机X轴加速度和 轴角速度数据。 绕Z轴角速度在车辆左变道行驶过程中数据特征 若手机在系统运行过程中处于X轴与车体横 明显,但与右变道过程恰好相反。 向水平参照线(如图5所示)平行,而X-Y平面处于 6)分析图3(h),手机Y轴加速度在急刹车过程 非水平的姿态时,系统对数据进行旋转校正,将其旋 中逐步由0减小至负值,车辆完成刹车趋于平稳后 转为前述“标准姿态”下的数据。校正算法为: 又返回0值。Y轴加速度数据特征与减速过程类 1)获取夹角:根据提取的手机三轴加速度数据 似,但变化幅度远大于正常减速过程。 A=[a,a,a.]和三轴环境磁场数据M=[m.m,m,] 综合分析6种驾驶行为,车载手机的三轴加速 (m,表示手机X轴的磁场环境数据,m,表示Y轴磁 度在车辆正常行驶过程中无明显波动,但在其他几 场环境数据,m,表示Z轴磁场环境数据,均由手机 种车辆驾驶行为情况下,手机三轴加速度数据均有 磁场传感器获得),利用融合三轴加速度数据和三 明显变化,而变道过程(包括左右变道)中绕Z轴角 轴环境磁场数据的算法(具体算法专利归传感器公 速度数据特征也很明显。 司所有),计算得到手机翻滚角α和俯仰角B,α和B 3车辆异常驾驶行为检测算法 分别表示手机沿X轴方向与水平面的夹角和沿Y 轴方向与水平面的夹角。 基于对传感器数据的深入分析,提出了一种车 2)数据旋转:基于空间三维坐标旋转方法,将 辆异常驾驶行为检测算法,并开发了一款基于该算 三轴加速度数据A=[aa,a.]和角速度数据G= 法的“车辆异常驾驶行为检测系统”,系统检测算法 [g.8,g]分别旋转至“标准姿态”下的虚拟水平面 流程如图4所示。 为A'=[ax'a,'a:']和G=[gx'g,'g:'门。旋转后的 开始 获取实时aa,a,888 手机虚拟姿态如图5所示。 车体横向水平 参照线 获取实时a,0,a,88,8 旋转校正后的 旋 旋转 虚拟姿态 校正 得到校正数据aa,aggg.' 特征 正模块 Y轴正向水平向前 X轴正向水 提取 特征 平向右 数据单元特征向量 特征 提取 与 两者平行 值 一化1 化 处理 图5手机数据旋转校正 待识别的归一化特征向量 模块 Fig.5 Data correction of smart phone 驾驶行为分类器 数据旋转形式如式(1)和式(2): 识 别 正常加速诚速左变道右变道急刹车 警 =R·AT= 异常识别 块 a: N N 频繁变道 cos B 0 頫繁变速> 急刹车 sin B a sin asin B cos a sin acos B 1) 4 -sin B cos a sin a N 警报] 警报2 警报3 a: 87 图4系统检测算法 =R·G= Fig.4 Detection algorithm of system Lg.'」 3.1手机动态参数旋转校正 1 sina·tanB cosa·tanB 车辆异常驾驶行为检测系统启动后,按照 0 cos a sin a (2) 100Hz的频率读取车载手机的三轴加速度数据和三 0 sin a/cos B cos a/eos B5)分析图 3(e)和图 3( g),手机 X 轴加速度和 绕 Z 轴角速度在车辆左变道行驶过程中数据特征 明显,但与右变道过程恰好相反。 6)分析图 3(h),手机 Y 轴加速度在急刹车过程 中逐步由 0 减小至负值,车辆完成刹车趋于平稳后 又返回 0 值。 Y 轴加速度数据特征与减速过程类 似,但变化幅度远大于正常减速过程。 综合分析 6 种驾驶行为,车载手机的三轴加速 度在车辆正常行驶过程中无明显波动,但在其他几 种车辆驾驶行为情况下,手机三轴加速度数据均有 明显变化,而变道过程(包括左右变道)中绕 Z 轴角 速度数据特征也很明显。 3 车辆异常驾驶行为检测算法 基于对传感器数据的深入分析,提出了一种车 辆异常驾驶行为检测算法,并开发了一款基于该算 法的“车辆异常驾驶行为检测系统”,系统检测算法 流程如图 4 所示。 图 4 系统检测算法 Fig.4 Detection algorithm of system 3.1 手机动态参数旋转校正 车辆异 常 驾 驶 行 为 检 测 系 统 启 动 后, 按 照 100 Hz的频率读取车载手机的三轴加速度数据和三 轴角速度数据。 若手机在系统运行过程中处于 X 轴与车体横 向水平参照线(如图 5 所示)平行,而 X⁃Y 平面处于 非水平的姿态时,系统对数据进行旋转校正,将其旋 转为前述“标准姿态”下的数据。 校正算法为: 1)获取夹角:根据提取的手机三轴加速度数据 A= [ax ay az]和三轴环境磁场数据 M = [mx my mz] (mx 表示手机 X 轴的磁场环境数据,my 表示 Y 轴磁 场环境数据,mz 表示 Z 轴磁场环境数据,均由手机 磁场传感器获得),利用融合三轴加速度数据和三 轴环境磁场数据的算法(具体算法专利归传感器公 司所有),计算得到手机翻滚角 α 和俯仰角 β,α 和 β 分别表示手机沿 X 轴方向与水平面的夹角和沿 Y 轴方向与水平面的夹角。 2)数据旋转:基于空间三维坐标旋转方法,将 三轴加速度数据 A = [ ax ay az ] 和角速度数据 G = [gx gy gz]分别旋转至“标准姿态”下的虚拟水平面 为 A′ = [ ax ′ ay ′ az ′]和 G′ = [ gx ′gy ′gz ′]。 旋转后的 手机虚拟姿态如图 5 所示。 图 5 手机数据旋转校正 Fig.5 Data correction of smart phone 数据旋转形式如式(1)和式(2): ax ′ ay ′ az ′ é ë ê ê ê ê ù û ú ú ú ú = R a oc·A T = cos β 0 sin β sin αsin β cos α - sin αcos β cos αcos β - sin β cos α sin α é ë ê ê êê ù û ú ú úú · ax ay az é ë ê ê ê ê ù û ú ú ú ú (1) gx ′ gy ′ gz ′ é ë ê ê ê ê ù û ú ú ú ú = R g oc·G T = 1 sin α·tan β cos α·tan β 0 cos α - sin α 0 sin α/ cos β cos α/ cos β é ë ê ê êê ù û ú ú úú · gx gy gz é ë ê ê ê ê ù û ú ú ú ú (2) 第 3 期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·413·