正在加载图片...
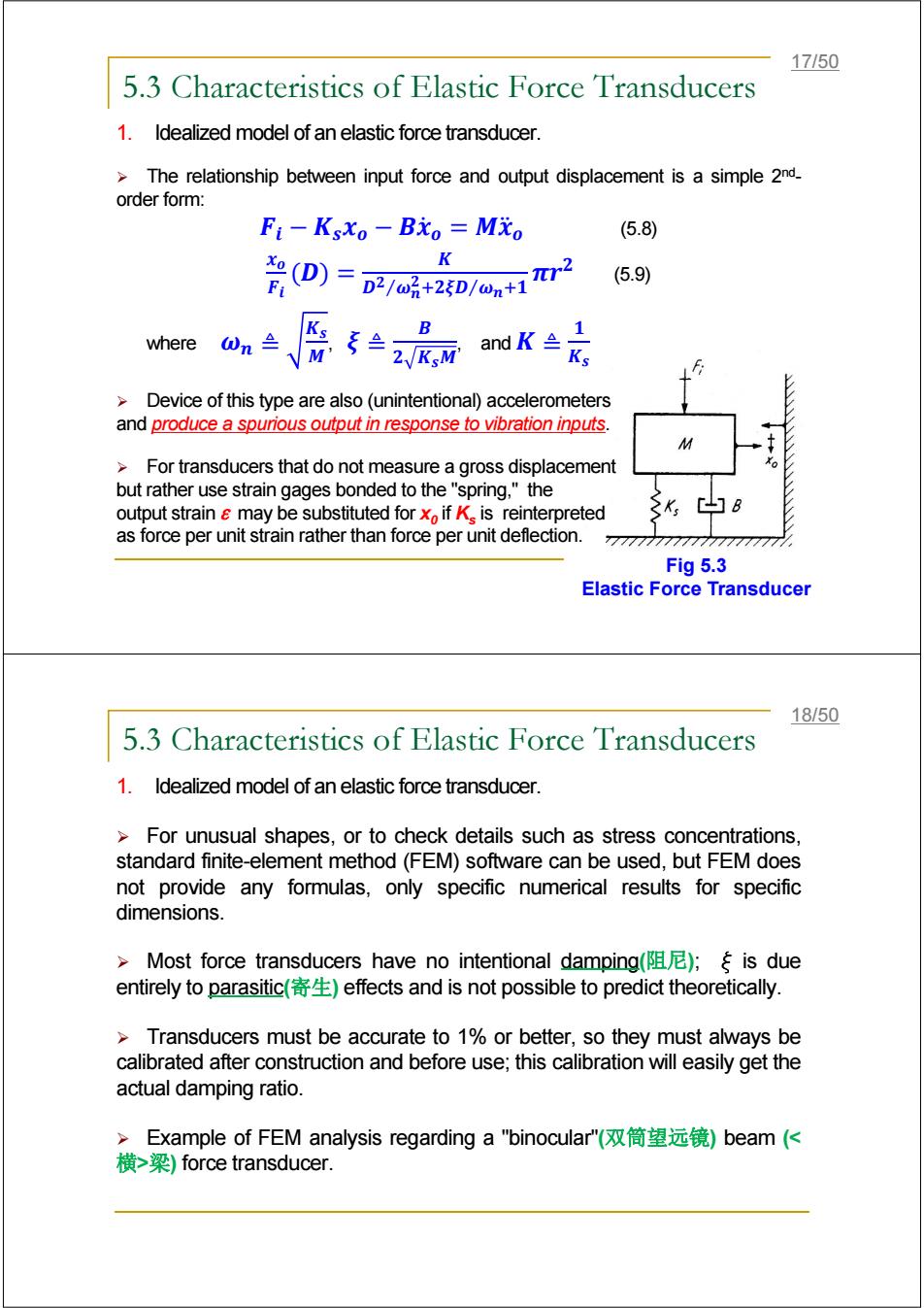
17/50 5.3 Characteristics of Elastic Force Transducers 1.Idealized model of an elastic force transducer. The relationship between input force and output displacement is a simple 2nd- order form: Fi-Ksxo-Bio Mxo (5.8) (D) K D2/@3+25D/@n+1 (5.9) B where wn兰 Ks 2KsM andK1 Device of this type are also(unintentional)accelerometers and produce a spurious output in response to vibration inputs. For transducers that do not measure a gross displacement but rather use strain gages bonded to the"spring,"the output strain may be substituted for xo if K is reinterpreted 3K [8 as force per unit strain rather than force per unit deflection. 7777777777777777777 Fig 5.3 Elastic Force Transducer 18/50 5.3 Characteristics of Elastic Force Transducers 1.Idealized model of an elastic force transducer. For unusual shapes,or to check details such as stress concentrations, standard finite-element method(FEM)software can be used,but FEM does not provide any formulas,only specific numerical results for specific dimensions. >Most force transducers have no intentional damping(阻尼);ξis due entirely to parasitic()effects and is not possible to predict theoretically. Transducers must be accurate to 1%or better,so they must always be calibrated after construction and before use;this calibration will easily get the actual damping ratio. >Example of FEM analysis regarding a"binocular'"(双筒望远镜)beam(K 横>梁)force transducer..5.3 Characteristics of Elastic Force Transducers 1. Idealized model of an elastic force transducer. ¾ The relationship between input force and output displacement is a simple 2ndorder form: ሶ࢞ − ࢙࢞ࡷ − ࡲ ሷ࢞ࡹ = ) 5.8) ࢞ ࡲ ࡷ = (ࡰ) ࣓ ࡰ (9.5 (࢘࣊ା ⁄࣓ ࡰࣈା ⁄ ࢙ࡷ ≜ ࣓ where ≜ ࣈ ,ࡹ ≜ ࡷ and, ࡹ࢙ࡷ ࢙ࡷ ¾ Device of this type are also (unintentional) accelerometers and produce a spurious output in response to vibration inputs. ¾ For transducers that do not measure a gross displacement but rather use strain gages bonded to the "spring," the output strain ε may be substituted for x0 if Ks is reinterpreted as force per unit strain rather than force per unit deflection. Fig 5.3 Elastic Force Transducer 17/50 5.3 Characteristics of Elastic Force Transducers 1. Idealized model of an elastic force transducer. ¾ For unusual shapes, or to check details such as stress concentrations, standard finite-element method (FEM) software can be used, but FEM does not provide any formulas, only specific numerical results for specific dimensions. ¾ Most force transducers have no intentional damping(阻尼); x is due entirely to parasitic(寄生) effects and is not possible to predict theoretically. ¾ Transducers must be accurate to 1% or better, so they must always be calibrated after construction and before use; this calibration will easily get the actual damping ratio. ¾ Example of FEM analysis regarding a "binocular"(双筒望远镜) beam (< 横>梁) force transducer. 18/50