正在加载图片...
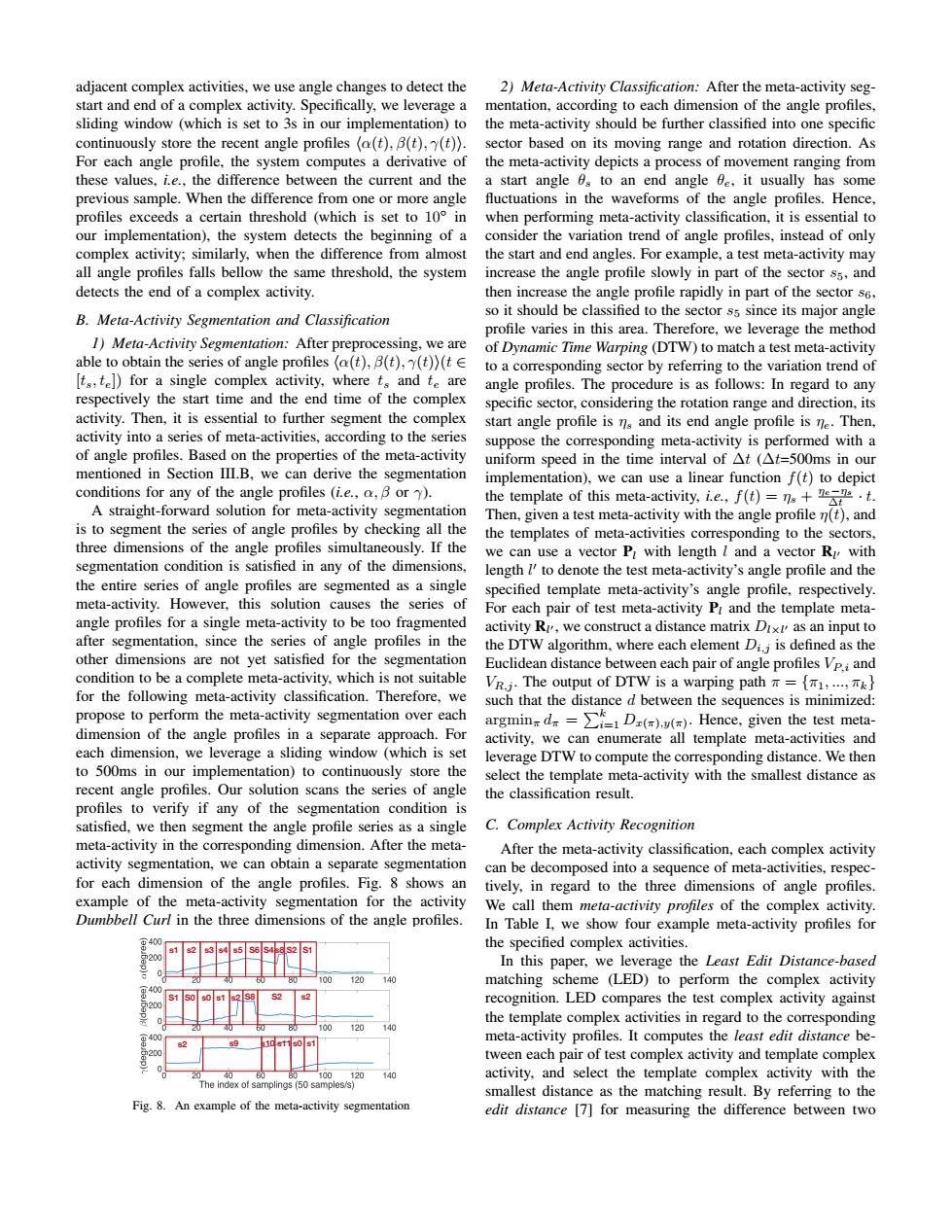
adjacent complex activities.we use angle changes to detect the 2)Meta-Activity Classification:After the meta-activity seg- start and end of a complex activity.Specifically,we leverage a mentation.according to each dimension of the angle profiles. sliding window (which is set to 3s in our implementation)to the meta-activity should be further classified into one specific continuously store the recent angle profiles (a(t),B(t),(t)). sector based on its moving range and rotation direction.As For each angle profile,the system computes a derivative of the meta-activity depicts a process of movement ranging from these values,i.e.,the difference between the current and the a start angle 0 to an end angle 0e,it usually has some previous sample.When the difference from one or more angle fluctuations in the waveforms of the angle profiles.Hence, profiles exceeds a certain threshold (which is set to 10 in when performing meta-activity classification,it is essential to our implementation).the system detects the beginning of a consider the variation trend of angle profiles,instead of only complex activity;similarly,when the difference from almost the start and end angles.For example,a test meta-activity may all angle profiles falls bellow the same threshold,the system increase the angle profile slowly in part of the sector s5,and detects the end of a complex activity then increase the angle profile rapidly in part of the sector s6, B.Meta-Activity Segmentation and Classification so it should be classified to the sector s5 since its major angle profile varies in this area.Therefore,we leverage the method 1)Meta-Activity Segmentation:After preprocessing,we are of Dynamic Time Warping(DTW)to match a test meta-activity able to obtain the series of angle profiles ((t),B(t),(t))(tE to a corresponding sector by referring to the variation trend of [ts,tel)for a single complex activity,where ts and te are angle profiles.The procedure is as follows:In regard to any respectively the start time and the end time of the complex specific sector,considering the rotation range and direction,its activity.Then,it is essential to further segment the complex start angle profile is ns and its end angle profile is ne.Then, activity into a series of meta-activities,according to the series suppose the corresponding meta-activity is performed with a of angle profiles.Based on the properties of the meta-activity uniform speed in the time interval of At (At=500ms in our mentioned in Section III.B,we can derive the segmentation implementation),we can use a linear function f(t)to depict conditions for any of the angle profiles (i.e.,o,B or ) the template of this meta-activity,i.e.,f(t)=n+n.t. A straight-forward solution for meta-activity segmentation Then,given a test meta-activity with the angle profile n(t),and is to segment the series of angle profiles by checking all the the templates of meta-activities corresponding to the sectors, three dimensions of the angle profiles simultaneously.If the we can use a vector P with length I and a vector R with segmentation condition is satisfied in any of the dimensions, length l'to denote the test meta-activity's angle profile and the the entire series of angle profiles are segmented as a single specified template meta-activity's angle profile,respectively. meta-activity.However,this solution causes the series of For each pair of test meta-activity P and the template meta- angle profiles for a single meta-activity to be too fragmented activity Ry,we construct a distance matrix Dix as an input to after segmentation,since the series of angle profiles in the the DTW algorithm,where each element Di.j is defined as the other dimensions are not yet satisfied for the segmentation Euclidean distance between each pair of angle profiles Vp.i and condition to be a complete meta-activity,which is not suitable VR.j.The output of DTW is a warping path={,.,} for the following meta-activity classification.Therefore,we such that the distance d between the sequences is minimized: propose to perform the meta-activity segmentation over each argmindD().v().Hence.given the test meta- dimension of the angle profiles in a separate approach.For activity,we can enumerate all template meta-activities and each dimension,we leverage a sliding window (which is set leverage DTW to compute the corresponding distance.We then to 500ms in our implementation)to continuously store the select the template meta-activity with the smallest distance as recent angle profiles.Our solution scans the series of angle the classification result. profiles to verify if any of the segmentation condition is satisfied,we then segment the angle profile series as a single C.Complex Activity Recognition meta-activity in the corresponding dimension.After the meta- After the meta-activity classification,each complex activity activity segmentation,we can obtain a separate segmentation can be decomposed into a sequence of meta-activities,respec- for each dimension of the angle profiles.Fig.8 shows an tively,in regard to the three dimensions of angle profiles. example of the meta-activity segmentation for the activity We call them meta-activity profiles of the complex activity Dumbbell Curl in the three dimensions of the angle profiles. In Table I,we show four example meta-activity profiles for 400 the specified complex activities. 820 In this paper,we leverage the Least Edit Distance-based 00 120 140 matching scheme (LED)to perform the complex activity 400 82 recognition.LED compares the test complex activity against the template complex activities in regard to the corresponding 00 120 "40 00 meta-activity profiles.It computes the least edit distance be- tween each pair of test complex activity and template complex 120 140 activity,and select the template complex activity with the The index of samplings(50 samples/s) smallest distance as the matching result.By referring to the Fig.8.An example of the meta-activity segmentation edit distance [7]for measuring the difference between twoadjacent complex activities, we use angle changes to detect the start and end of a complex activity. Specifically, we leverage a sliding window (which is set to 3s in our implementation) to continuously store the recent angle profiles hα(t), β(t), γ(t)i. For each angle profile, the system computes a derivative of these values, i.e., the difference between the current and the previous sample. When the difference from one or more angle profiles exceeds a certain threshold (which is set to 10◦ in our implementation), the system detects the beginning of a complex activity; similarly, when the difference from almost all angle profiles falls bellow the same threshold, the system detects the end of a complex activity. B. Meta-Activity Segmentation and Classification 1) Meta-Activity Segmentation: After preprocessing, we are able to obtain the series of angle profiles hα(t), β(t), γ(t)i(t ∈ [ts, te]) for a single complex activity, where ts and te are respectively the start time and the end time of the complex activity. Then, it is essential to further segment the complex activity into a series of meta-activities, according to the series of angle profiles. Based on the properties of the meta-activity mentioned in Section III.B, we can derive the segmentation conditions for any of the angle profiles (i.e., α, β or γ). A straight-forward solution for meta-activity segmentation is to segment the series of angle profiles by checking all the three dimensions of the angle profiles simultaneously. If the segmentation condition is satisfied in any of the dimensions, the entire series of angle profiles are segmented as a single meta-activity. However, this solution causes the series of angle profiles for a single meta-activity to be too fragmented after segmentation, since the series of angle profiles in the other dimensions are not yet satisfied for the segmentation condition to be a complete meta-activity, which is not suitable for the following meta-activity classification. Therefore, we propose to perform the meta-activity segmentation over each dimension of the angle profiles in a separate approach. For each dimension, we leverage a sliding window (which is set to 500ms in our implementation) to continuously store the recent angle profiles. Our solution scans the series of angle profiles to verify if any of the segmentation condition is satisfied, we then segment the angle profile series as a single meta-activity in the corresponding dimension. After the metaactivity segmentation, we can obtain a separate segmentation for each dimension of the angle profiles. Fig. 8 shows an example of the meta-activity segmentation for the activity Dumbbell Curl in the three dimensions of the angle profiles. s1 s2 s3 s4 s5 S6 S4 s8 S2 S1 S1 S0 s0 s1 s2 S8 S2 s2 s2 s9 s10 s11 s0 s1 Fig. 8. An example of the meta-activity segmentation 2) Meta-Activity Classification: After the meta-activity segmentation, according to each dimension of the angle profiles, the meta-activity should be further classified into one specific sector based on its moving range and rotation direction. As the meta-activity depicts a process of movement ranging from a start angle θs to an end angle θe, it usually has some fluctuations in the waveforms of the angle profiles. Hence, when performing meta-activity classification, it is essential to consider the variation trend of angle profiles, instead of only the start and end angles. For example, a test meta-activity may increase the angle profile slowly in part of the sector s5, and then increase the angle profile rapidly in part of the sector s6, so it should be classified to the sector s5 since its major angle profile varies in this area. Therefore, we leverage the method of Dynamic Time Warping (DTW) to match a test meta-activity to a corresponding sector by referring to the variation trend of angle profiles. The procedure is as follows: In regard to any specific sector, considering the rotation range and direction, its start angle profile is ηs and its end angle profile is ηe. Then, suppose the corresponding meta-activity is performed with a uniform speed in the time interval of ∆t (∆t=500ms in our implementation), we can use a linear function f(t) to depict the template of this meta-activity, i.e., f(t) = ηs + ηe−ηs ∆t · t. Then, given a test meta-activity with the angle profile η(t), and the templates of meta-activities corresponding to the sectors, we can use a vector Pl with length l and a vector Rl 0 with length l 0 to denote the test meta-activity’s angle profile and the specified template meta-activity’s angle profile, respectively. For each pair of test meta-activity Pl and the template metaactivity Rl 0 , we construct a distance matrix Dl×l 0 as an input to the DTW algorithm, where each element Di,j is defined as the Euclidean distance between each pair of angle profiles VP,i and VR,j . The output of DTW is a warping path π = {π1, ..., πk} such that the distance d between the sequences is minimized: argminπ dπ = Pk i=1 Dx(π),y(π) . Hence, given the test metaactivity, we can enumerate all template meta-activities and leverage DTW to compute the corresponding distance. We then select the template meta-activity with the smallest distance as the classification result. C. Complex Activity Recognition After the meta-activity classification, each complex activity can be decomposed into a sequence of meta-activities, respectively, in regard to the three dimensions of angle profiles. We call them meta-activity profiles of the complex activity. In Table I, we show four example meta-activity profiles for the specified complex activities. In this paper, we leverage the Least Edit Distance-based matching scheme (LED) to perform the complex activity recognition. LED compares the test complex activity against the template complex activities in regard to the corresponding meta-activity profiles. It computes the least edit distance between each pair of test complex activity and template complex activity, and select the template complex activity with the smallest distance as the matching result. By referring to the edit distance [7] for measuring the difference between two