正在加载图片...
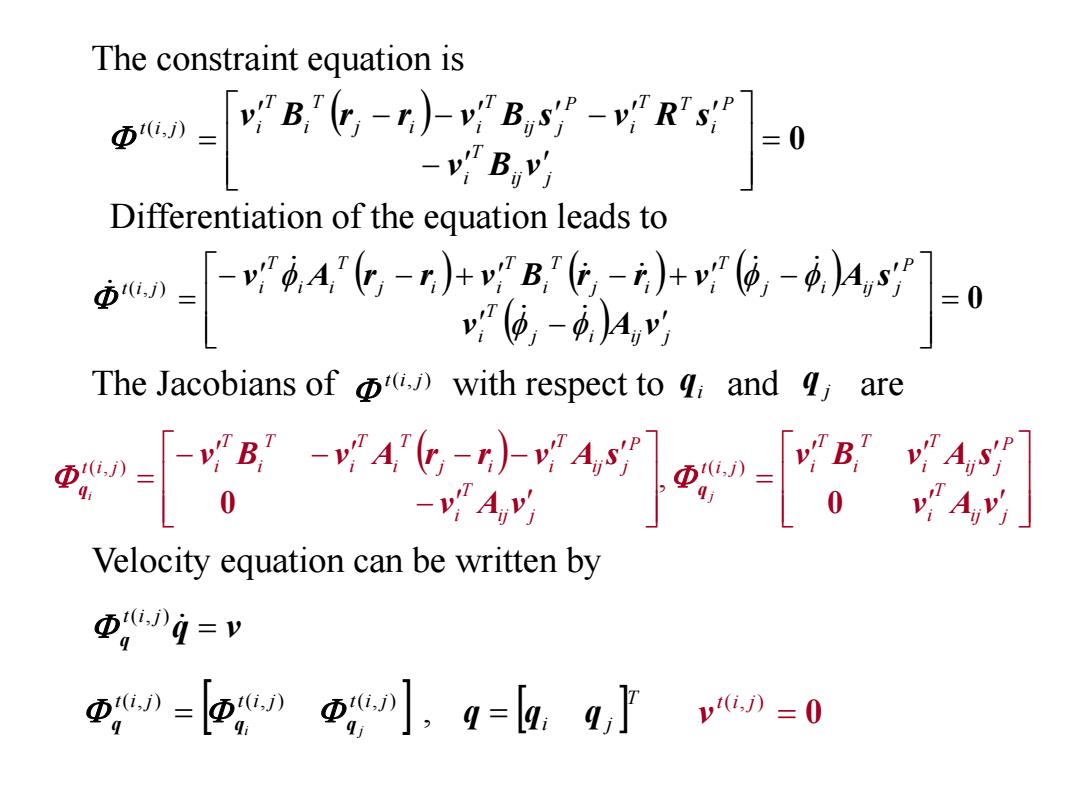
The constraint equation is Differentiation of the equation leads to --语66-] @,-)Ay The Jacobians of with respect to 4,and 4 are -vAv Velocity equation can be written by =v p小=》],q=ag p(i.i)=0 0 ij j T i P i T T i P ij j T j i i T i T t i j i v B v v B r r v B s v R s ( , ) 0 j i ij j T i P j i ij j T j i i T i T j i i T i i T t i j i v A v v A r r v B r r v A s ( , ) ij j T i P ij j T i T i T t i j i ij j T i P ij j T j i i T i T i T i T t i j i i j v A v v B v A s v A v v B v A r r v A s q q 0 0 ( , ) ( , ) , 0 t(i, j) v T i j t i j t i j t i j i j q q q , q q q ( , ) ( , ) ( , ) The constraint equation is Differentiation of the equation leads to The Jacobians of with respect to and are t(i, j) i q j q Velocity equation can be written by q v q t(i, j)