正在加载图片...
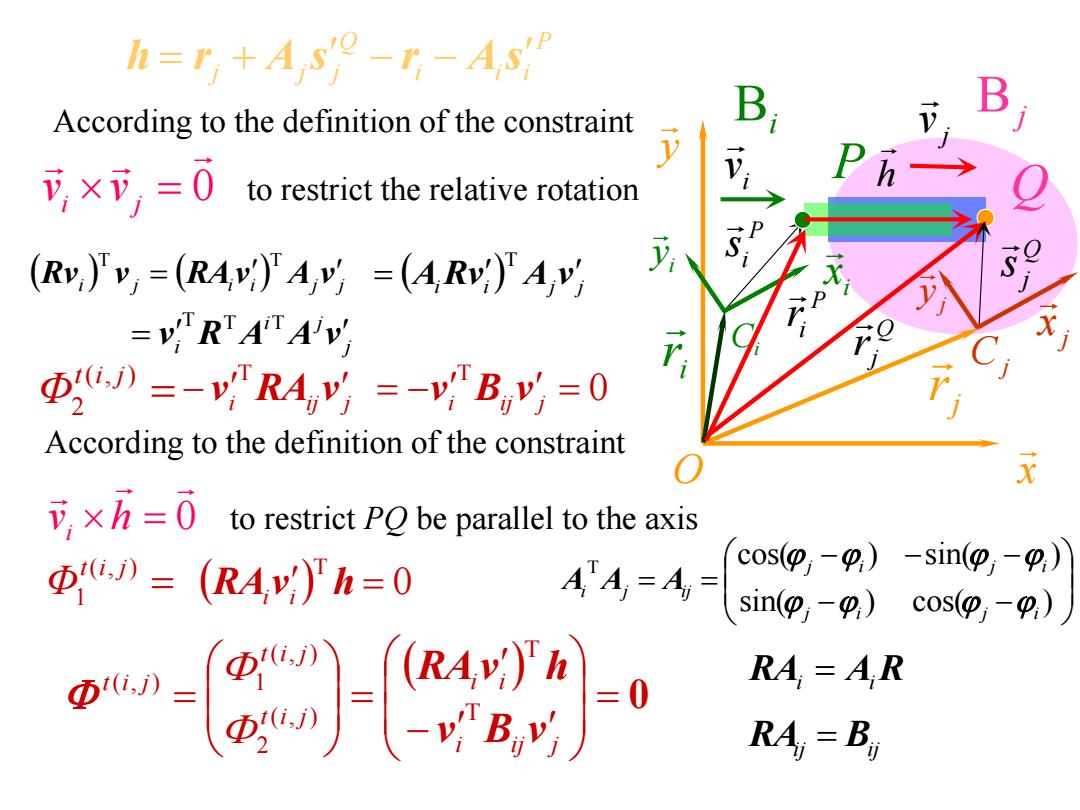
h=r+A s -r-As According to the definition of the constraint B ,×可,=0 toeitheativeoation (Rv)v,=(RAv:)A=(A Rv:)Av =VRTATAV F D》=-yRAy=-vB,y=0 According to the definition of the constraint 0to restrict P be parallel to the axis D》=(RA,)'h=0 AA=A= cos(p,-9,)-sin(p,-9,) sin(,-)cos(o;-) 。--a =0 RA=AR RA=BAccording to the definition of the constraint 0 vi v j 0 vi h i j i i j j Rv v RAv A v T T 0 T RAivi h i ij j v RA v T i i j j A Rv A v T sin( ) cos( ) cos( ) sin( ) T j i j i j i j i i j ij A A A 0 i ij j i i t i j t i j t i j v B v RAv h T T ( , ) 2 ( , ) ( , ) 1 to restrict the relative rotation P i i i Q j j j h r A s r A s ( , ) 2 t i j Φ ( , ) 1 t i j Φ Bj y x O j x y j Cj j r Q Q j r Q j s P i s i x i y Ci Bi ir P P ir h i v j v 0 T vi Bijv j RAi AiR j i j i v R A A v T T T RAij Bij According to the definition of the constraint to restrict PQ be parallel to the axis